

I. 서 론
II. 기존 BOTMA 기법
III. 음파전달모델을 이용한 TMA 기법
IV. 성능분석
4.1 한국 해양환경에서의 음파전달 모델
4.2 음파전달모델을 이용한 TMA 성능 분석
4.3 표적방사소음에 따른 TMA 성능 분석
V. 결 론
I. 서 론
수동소나에서의 표적기동분석(Target Motion Analysis, TMA)은 탐지된 표적의 방위 또는 방위-주파수 측정치 정보를 이용하여 표적의 거리, 침로, 속력을 추정하는 기술이다. 측정치 정보에 따라 방위정보만을 이용하는 BOTMA(Bearing Only TMA)와 방위-주파수정보를 함께 이용하는 BFTMA(Bearing Frequency TMA)로 구분된다.[1],[2] 이러한 TMA는 가관측성이 보장되는 조건[3],[4]에서 일정 시간동안 획득된 측정치를 이용하여 표적기동 초기치를 추정하는 일괄추정 기법과 일괄추정으로부터 산출한 표적기동 초기치를 필터의 초기치로 설정하여 표적 정보를 추정하는 순차추정 방법이 결합되어 수행되는 것이 일반적이다.[5],[6] 따라서 빠르고 정확한 TMA 결과를 얻기 위해서는 일괄추정 시 정확한 표적기동 초기치를 산출하는 것이 중요하다. 일반적인 일괄추정기법으로는 일정시간동안 측정된 방위 또는 방위-주파수 정보를 이용한 ML(Maximum Likelihood) 추정이 적용되며 Gauss-Newton과 같은 수치해석 기법으로 해를 산출한다.[7]
방위 또는 방위-주파수 정보 외에 다른 정보를 추가적으로 이용할 수 있다면, 일괄추정기법의 수렴속도와 정확도를 향상시킬 수 있다. 표적의 방사소음수준을 알고 있다면, 측정된 신호 대 잡음비(Signal to Noise Ratio,SNR) 정보와 음파 전달 모델을 추가적으로 이용하여 MAP(Maximum A Posterior) 추정 기법으로 표적기동 초기치를 효과적으로 산출할 수 있다.[8] 음파전달모델을 이용한 MAP 추정 기법은 일반적인 TMA에서 ML 추정을 위해 적용하는 Gauss-Newton과 같은 수치해석 기법이 아닌 EM(Expectation- maximization) 기법을 적용하여 비선형 측정치 방정식의 미분가능성에 대한 고려가 불필요하다는 장점이 있다.[9] 그러나 이 기법은 가정한 방사소음수준이 실제와 차이가 크다면 TMA 결과의 정확도가 저하되는 제한점이 있을 수 있다.
본 논문에서는 음파 전달 모델과 측정치 SNR정보를 이용하여 표적기동 초기치를 효과적으로 추정하는 TMA 기법을 한국 해양환경(동해/서해/남해)에 적용해보고 그 성능을 분석 하였다. 또한 가정한 표적방사소음과 실제 표적방사소음 간의 차이에 따른 성능저하 정도에 대해 분석하였다.
본 논문은 1장 서론에 이어 2장에서는 기존 BOTMA기법에 대한 설명과 제한점에 대하여 기술하였다. 그리고 3장에서는 음파전달모델을 이용한 TMA기법에 대해 소개하며, 4장에서는 한국 해양 환경에서의 TMA에 대한 성능분석에 대해 제시하였다. 그리고 마지막 5장에서 결론을 맺는다.
II. 기존 BOTMA 기법
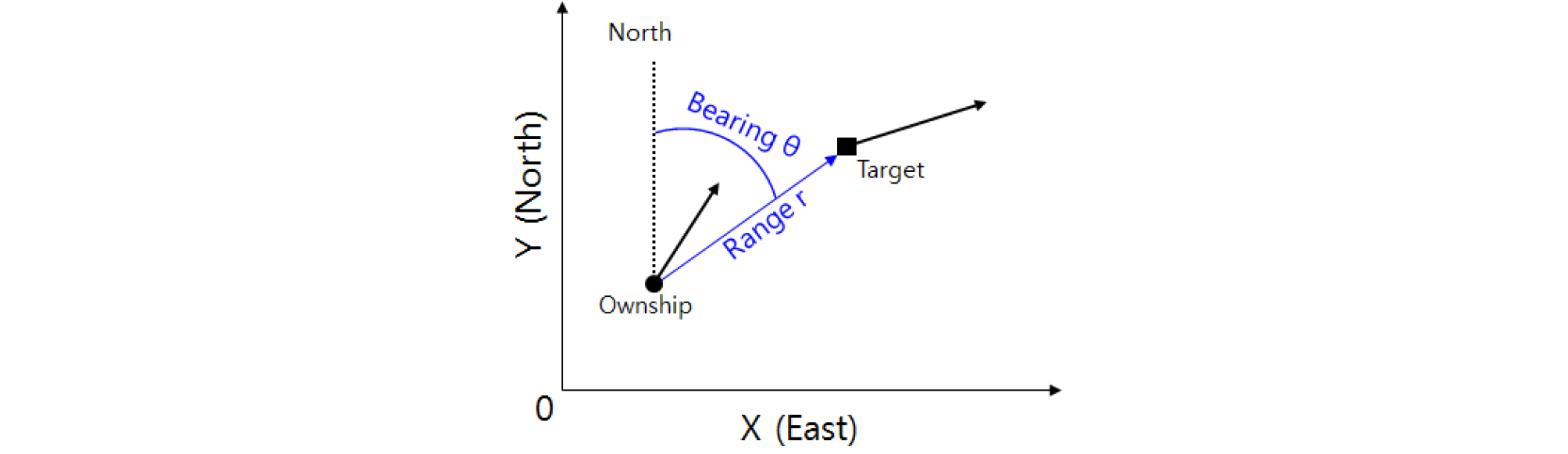
수동소나에서의 표적과 자함의 기하학적 관계는 Fig. 1에 나타나 있다. 표적과 자함은 진북을 기준으로 방위 θ의 관계를 가지며 거리 r은 센서를 통해 직접적으로 얻을 수 없는 정보이다. 따라서 방위 또는 방위-주파수의 제한된 정보를 이용하여 표적의 거리, 방위, 침로, 속력을 추정하기 위하여 필터링 기법이 적용된다. 그러나 수동소나의 경우 초기 거리를 알 수 없기 때문에 필터링 기법으로 오랜 수렴기간을 거쳐 표적의 기동을 추정해야 한다는 제한점이 있다. 이를 보완하기 위해 ML 추정기법으로 표적기동의 초기치를 산출한 후 필터링 기법을 적용한다.[5],[6]
초기치 산출 시 ML 추정 기법의 적용은 일정 시간동안 획득한 측정치에 대해 확률밀도함수를 최대로 만드는 표적기동을 산출하는 문제로 정의 될 수 있으며, 확률밀도함수가 비선형방정식으로 표현되므로 Gauss-Newton 과 같은 수치해석 기법으로 최적해를 산출한다.[7]일괄추정 단계에서 비선형 문제를 해결하기 위해 표적이 일정한 속력과 침로로 기동한다고 가정하고 표적기동 초기치, 상태 방정식과 측정치 방정식을 다음과 같이 정의 한다.
| $$X_0^{tgt}=\lbrack x_0^{tgt}y_0^{tgt}x_0^{\dot tgt}y_0^{t\dot gt}\rbrack^T,$$ | (1) |
| $$X_n^{tgt}=F\cdot X_{n-1}^{tgt}+w_n,$$ | (2) |
| $$X_{n-1}^{tgt}=\lbrack x_{n-1}^{tgt}y_{n-1}^{tgt}x_{n-1}^{t\dot gt}y_{n-1}^{t\dot gt}\rbrack^T,$$ | (3) |
| $$F=\begin{bmatrix}1&0&T&0\\0&1&0&T\\0&0&1&0\\0&0&0&1\end{bmatrix},$$ | (4) |
| $$z_n=\lbrack\theta_n\rbrack=h(X_n^{tgt})+\nu_n,$$ | (5) |
| $$h(X_n^{tgt})=\left[tan^{-1}\frac{x_n^{tgt}-x_n^{os}}{y_n^{tgt}-y_n^{os}}\right],$$ | (6) |
| $$X_n^{os}=\left[x_n^{os}y_n^{os}x_n^{\dot os}y_n^{\dot os}\right]^T,$$ | (7) |
여기서 와 는 각각 표적기동 초기치 및 초기치로부터의 n시간 후의 직교 좌표계에서 표적의 X축 거리, Y축 거리, X축 속력, Y축 속력에 해당하는 상태벡터를 의미한다. 그리고 F는 시스템 천이 함수이며 T는 샘플링 시간이다. wn는 공정잡음으로 평균 0, 공분산행렬 Qn인 정규분포로 가정한다. zn는 n시간의 측정치로 방위의 벡터이다. h(.)는 측정치와 표적 상태벡터와의 관계 함수이며, 는 n시간 후의 직교 좌표계에서 관측자(자함)의 X축 거리, Y축 거리, X축 속력, Y축 속력을 의미한다. 그리고 vn는 측정 잡음으로 평균 0, 공분산행렬 Rn인 정규분포로 가정한다.
앞서 정의된 표적의 상태방정식과 측정치 방정식을 이용하여 조건부 확률밀도함수를 Eq. (8)과 같이 정의할 수 있다.
| $$p_{Z\vert X^{tgt}}(Z\vert X^{tgt};X^{os})=\prod_{n=1}^Np_{z_n\vert X_n^{tgt}}(z_n\vert X_n^{tgt};X_n^{os}),$$ | (8) |
| $$Z=\{z_1,\;z_2,\;\cdots,\;z_n\},$$ | (9) |
| $$X^{tgt}=\{X_1^{tgt},\;X_2^{tgt},\;\cdots,\;X_n^{tgt}\},$$ | (10) |
| $$X^{os}=\{X_1^{os},\;X_2^{os},\;\cdots,\;X_n^{os}\},$$ | (11) |
| $$p_{z_n\vert X_n^{tgt}}(z_n\vert X_n^{tgt};X_n^{os})=\frac1{\sqrt{2\pi}\sigma_\theta}e^{\gamma_n},$$ | (12) |
| $$\gamma_n=\frac12(z_n-h(X_n^{tgt})^T\Psi(z_n-h(X_n^{tgt})),$$ | (13) |
| $$\psi=\sigma_\theta^{-2}\;.$$ | (14) |
Eq. (14)에서 σθ는 방위 측정잡음의 표준편차를 의미한다.
Eq. (8)의 확률밀도함수를 최대로 만드는 표적기동 초기치 를 구하는 문제는 다음의 성능지수함수를 최소화하는 문제로 귀결된다.
| $$X_0^{tgt,\;ML}=\mathrm{argmin}\sum_{n=1}^N\gamma_n(X_0^{tgt}).$$ | (15) |
Eq. (15)의 성능지수함수는 비선형함수이므로 수치해석기법인 Gauss-Newton 기법으로 이를 최소화하는 를 계산한다. Gauss-Newton 기법을 통해 계산된 k번째 표적기동 초기치 는 다음과 같다.
| $$\begin{array}{l}\frac{\partial X_n^{tgt}}{\partial X_0^{tgt}}=\begin{bmatrix}1&0&nT&0\\0&1&0&nT\\0&0&1&0\\0&0&0&1\end{bmatrix}.\\\\\end{array}$$ | (18) |
단, 여기서 Gauss-Newton과 같은 수치해석 기법을 적용하기 위해서는 측정치 방정식의 미분과정이 필요하다는 제한점이 있다. 미분이 불가능한 측정치 방정식의 경우 수치해석 기법의 적용이 제한될 수 있다.
순차추정 단계에서는 일괄추정 단계에서 수치해석 기법으로 산출한 표적기동 초기치에 필터링 기법을 적용하여 표적의 현재위치를 순차적으로 추정한다. 일반적인 비선형 필터링 기법으로는 extended Kalman filter와 particle filter 등이 사용된다.[10] 일괄추정 시 정확한 표적기동 초기치가 산출된다면 순차추정 단계에서는 수렴시간이 단축 되어 보다 빠른 시간 내에 정확한 표적기동을 산출할 수 있다.
III. 음파전달모델을 이용한 TMA 기법
기존의 TMA기법은 방위 또는 방위-주파수 정보만을 이용하여 TMA를 수행한다. 그러나 이러한 정보 외에 추가적인 정보를 함께 이용한다면 정보량의 증가로 TMA의 수렴속도와 정확도가 향상될 수 있다. 일괄추정 단계에서 방위 또는 방위-주파수 정보와 함께 측정되는 SNR 정보와 음파전달모델로 산출한 SNR 정보를 추가로 이용하여 기존 TMA의 ML 추정과는 다르게 MAP 추정으로 표적기동의 초기치를 추정 할 수 있다.[8] TMA 문제를 해결하는 시간동안 거리별 SNR 확률분포는 변하지 않는다고 가정하였다.
음파 전달 모델을 이용한 일괄추정을 위해 Eq. (19)[8]의 조건부 확률밀도함수를 정의 할 수 있다.
| $$p_{\xi_n\vert r_n\theta_n}(\xi_n\vert r_n,\theta_n;X_n^{os})=N(\xi_n\vert\overline\xi(r_n,\theta_n),\sigma_{SNR}^2;X_n^{os}),$$ | (20) |
| $$\mu_n(r_n,\theta_n)=\begin{bmatrix}x_n^{os}+r_n\sin\theta_n\\y_n^{os}+r_n\cos\theta_n\end{bmatrix},$$ | (21) |
여기서 는 측정된 SNR ξn이 해당 거리in에 존재할 확률을 의미하고, 여기서 는 해당 거리rn과 측정 방위 θn에서의 평균 SNR을 은 SNR분산을 의미한다. 는 해당거리 rn 및 측정방위 θn에서의 추정위치 의 존재확률을 의미한다. 그리고 ∑n는 거리 rn에 대해 규준화 된 분산으로써 방위분산 및 거리분산 을 x, y 도메인으로 변환을 의미한다.
음파전달모델을 이용한 TMA는 Eq. (19)의 확률밀도함수를 최대화 하는 표적기동 초기치 를 구하는 MAP 추정 문제로 귀결된다.
| $$X_0^{tgt,MAP}=\arg\;\max\;p_{x^{tgt}y^{tgt}\vert Z}(x^{tgt}(X_0^{tgt}),y^{tgt}(X_0^{tgt})\vert Z;X^{os}).$$ | (23) |
Eq. (23)[8]의 는 EM기법으로 추정할 수 있다. EM기법을 이용한 초기치 추정 방법은 R. L. Streit[8]이 제시하였으며, 추정된 표적기동 초기치는 다음의 Eqs. (24)와 (28)[8]로 표현된다.
| $${X_0^{tgt}}_{new}=\lbrack\sum_{n=1}^NA_n(z_n)\rbrack^{-1}\lbrack\sum_{n=1}^Nb_n(z_n)\rbrack,$$ | (24) |
| $$A_n(z_n)=F_n'^T{\textstyle\sum_n^{-1}}(\theta_n)F_n'\times\int_{r_{min}^{(n)}}^{r_{max}^{(n)}}{p_{miss(n)}(r_n\vert z_n;X_n^{os},{X_0^{tgt}}_{old})\frac{dr_n}{r_n},}$$ | (25) |
| $$F_n^{'}=\begin{bmatrix}1&0&nT&0\\0&1&0&nT\end{bmatrix},$$ | (27) |
기존의 ML 일괄추정과의 차이는 측정치의 도메인(θn,ξn)이 아닌 평면좌표계의 추정치 도메인(x,y)에서 MAP 추정을 통해 최적해를 산출한다는 점이다. 따라서 Gauss-Newton과 같은 수치 해석 기법 적용을 위한 비선형 측정치 방정식의 미분과정이 불필요하다. 이는 측정치 방정식의 미분가능성 여부에 대한 제한이 없다는 장점을 지닌다.
IV. 성능분석
본 장에서는 3장에서 소개한 음파전달모델을 이용한 TMA 기법으로 한국 해양환경에서 성능을 분석하였다. 한국의 대표 해양환경인 동해, 서해 및 남해 해역에서의 음파전달모델을 이용한 TMA를 수행하였고, 가정한 방사소음과 실제 방사소음과의 차이에 따른 성능분석을 수행하였다.
4.1 한국 해양환경에서의 음파전달 모델
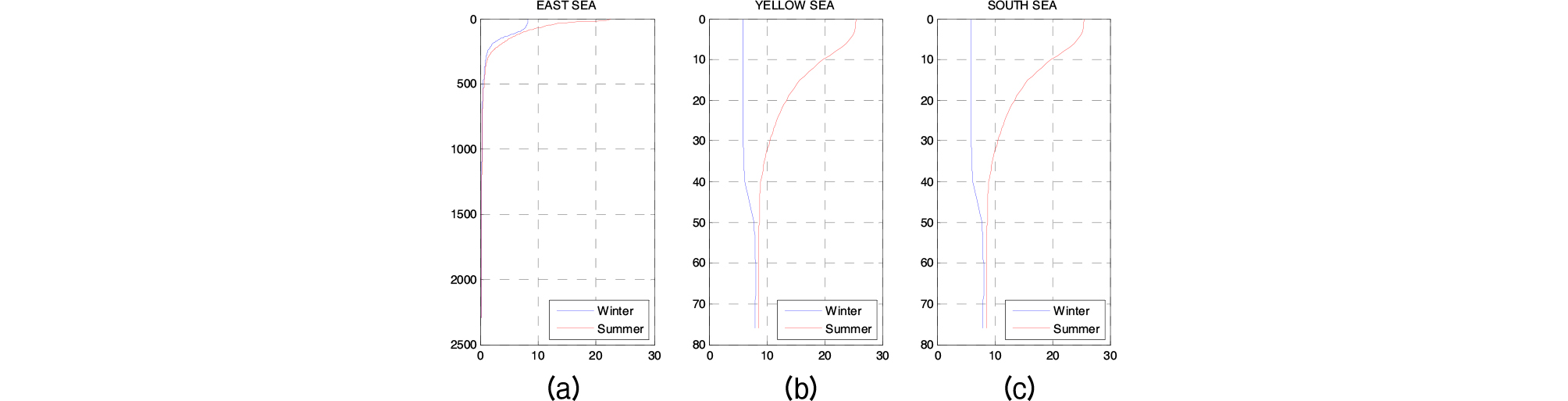
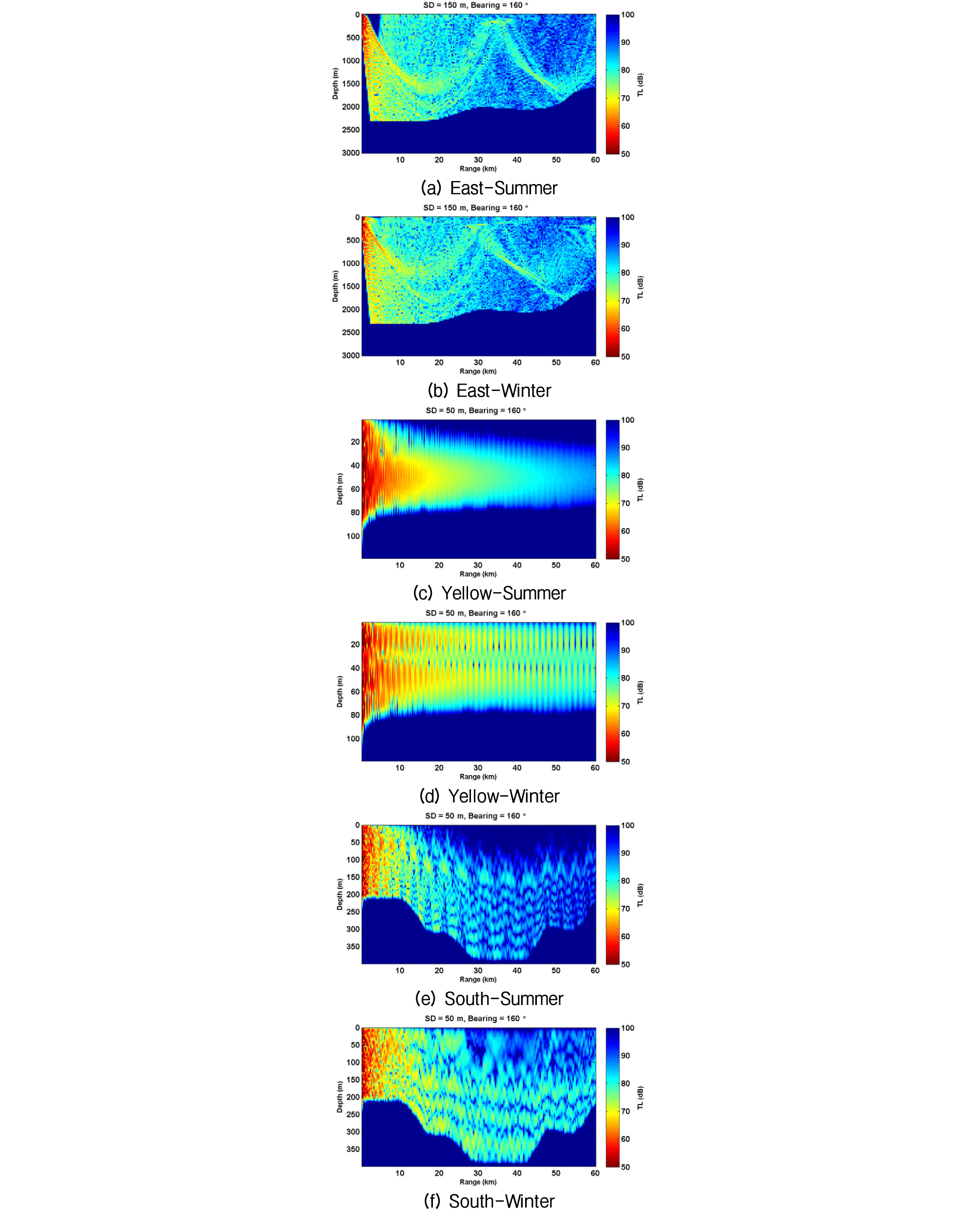
국방과학연구소에 보유한 음파전달모델인 포물선방정식법기반 RAM모델[11]로 동해 38.33°N / 130.42°E / 심도 2295 m, 서해 37.60°N / 124.16°E / 심도 76 m 그리고 남해 32.77°N / 128.24°E / 심도 193 m에서 여름(8월)과 겨울(2월)의 한국해양온도모델 DB 수직수온분포를 이용하여 전달손실을 산출하였다. Fig. 2의 각 해역에서 여름과 겨울의 수직수온분포 정보를 이용하여 산출한 전달손실은 Fig. 3와 같다. 한국 해역의 여름철은 해수면 수온이 높아 음파의 하향굴절이 주로 발생하여 표층에서의 탐지 거리가 짧게 나타난다. 그러나 상대적으로 겨울철은 수심에 따른 수온차가 크지 않아 탐지 거리가 멀게 나타나는 특징이 있다. 그리고 수심이 얕은 서해, 남해와 달리 동해는 여름과 겨울 모두 음수렴 구역이 나타나는 특징이 있다.
4.2 음파전달모델을 이용한 TMA 성능 분석
음파전달 모델을 이용한 TMA의 성능을 분석하기 위해 Fig. 4와 같은 기동 시나리오를 가정하였다.
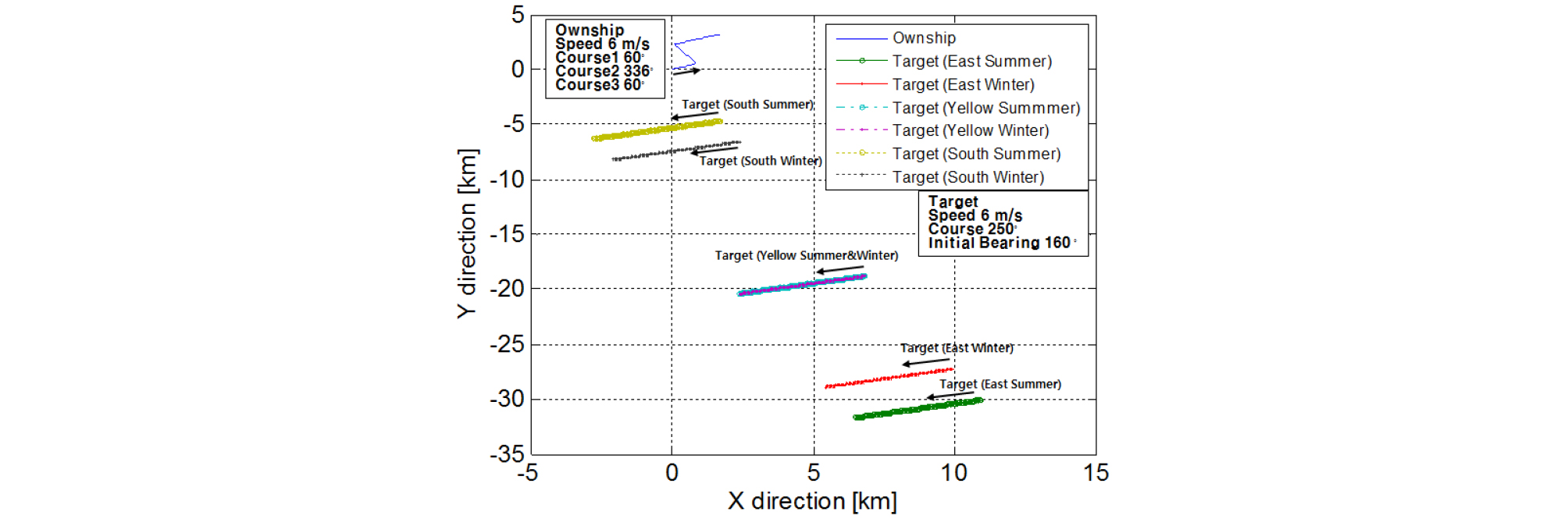
자함은 가관측성이 보장되도록 2차례 변침기동을 수행하며 표적은 직선운동으로 기동한다고 가정하다. 또한 표적은 초기 자함 위치를 기준으로 160° 방위에 위치한다.
표적의 방사소음수준은 주파수 200 Hz기준으로 140 dB로 설정하였고 해당 주파수에서의 주변소음수준은 73 dB로 설정하였다. 선배열 센서 탐지로 DI는 12.5 dB 설정하였고, 표적 수심은 센서의 수심과 동일하다고 가정하였다. 탐지된 표적의 방위 및 SNR 측정오차는 AWGN으로 각각 N(0,), N(0,)를 가진다고 가정하였다. 탐지 정보는 8초 주기로 갱신되며, 총 100개 프레임 정보를 이용하였다.
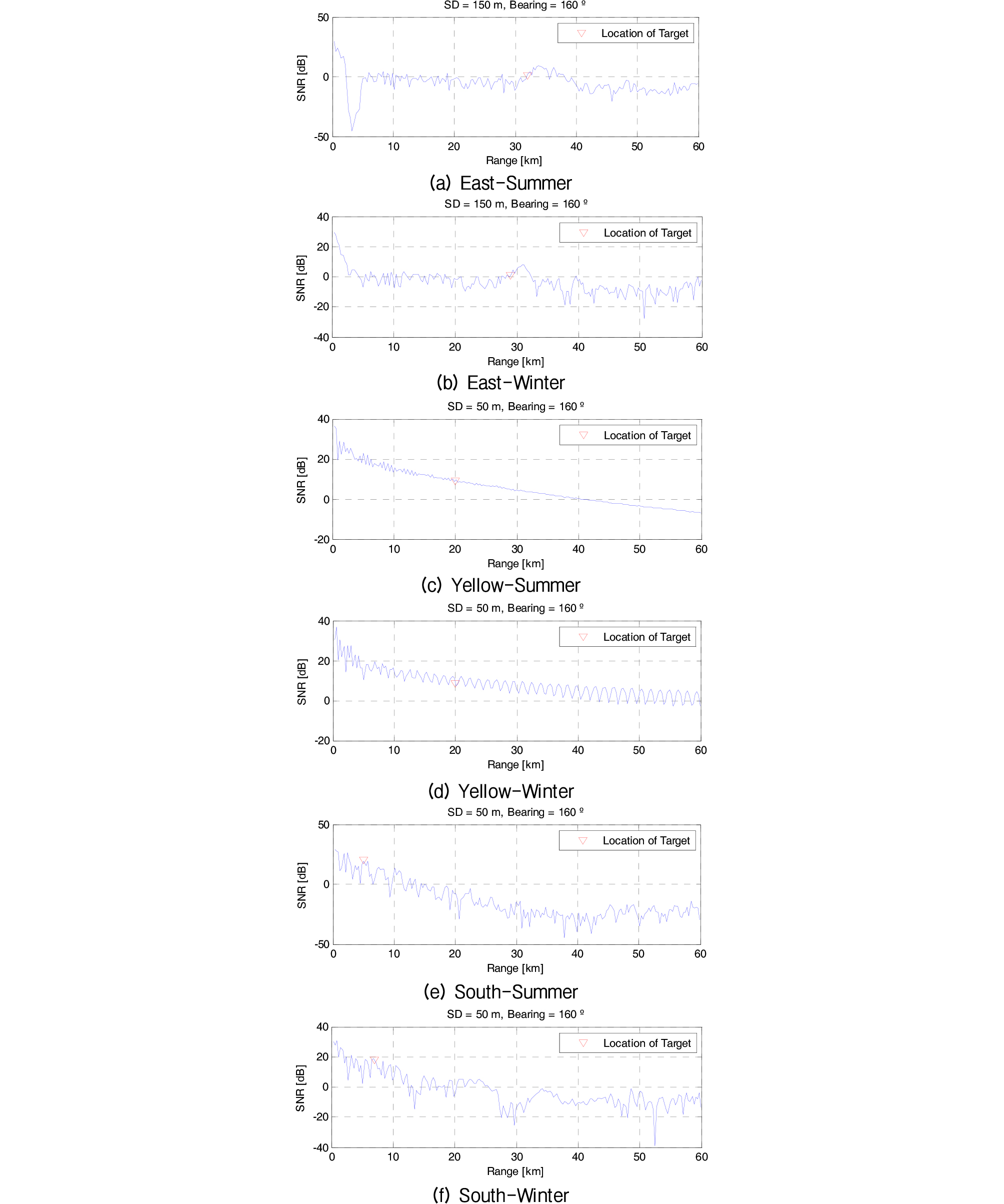
탐지된 표적의 SNR은 수동소나 방정식[12]으로 산출 할 수 있으며 다음의 Eq. (30)과 같다.
| $$SNR=SL-TL+DI-NL,$$ | (30) |
여기서 SL은 표적방사소음수준을 의미하며, TL은 전달손실, DI는 지향지수 그리고 NL은 주변소음수준을 의미한다. Eq. (30)을 이용하여 산출한 각 해역의 각 수심에서의 거리별 SNR은 Fig. 5와 같다. 해역/계절 별로 탐지거리가 다르기 때문에 각 환경에 맞게 표적이 탐지가 가능한 위치를 선정하였다.
각 해역에서의 음파전달 모델을 이용한 TMA의 성능을 분석하기 위해 각 해역별로 σθ=0.5˚, σSNR=1dB의 조건으로 Monte-Carlo 시뮬레이션 100회를 수행하였고 시점/종점 위치의 추정해와 실제해의 차이를 Fig. 6의 그래프로 표현하였다. 단, 해역/계절별로 표적 거리가 다르기 때문에 오차는 시점 거리/종점 거리에 대하여 각각 규준화를 하여 나타내었다. 그리고 각 해역에서의 오차의 평균과 평균제곱근오차(Root Mean Square Error, RMSE)를 Table 1에 나타내었다.
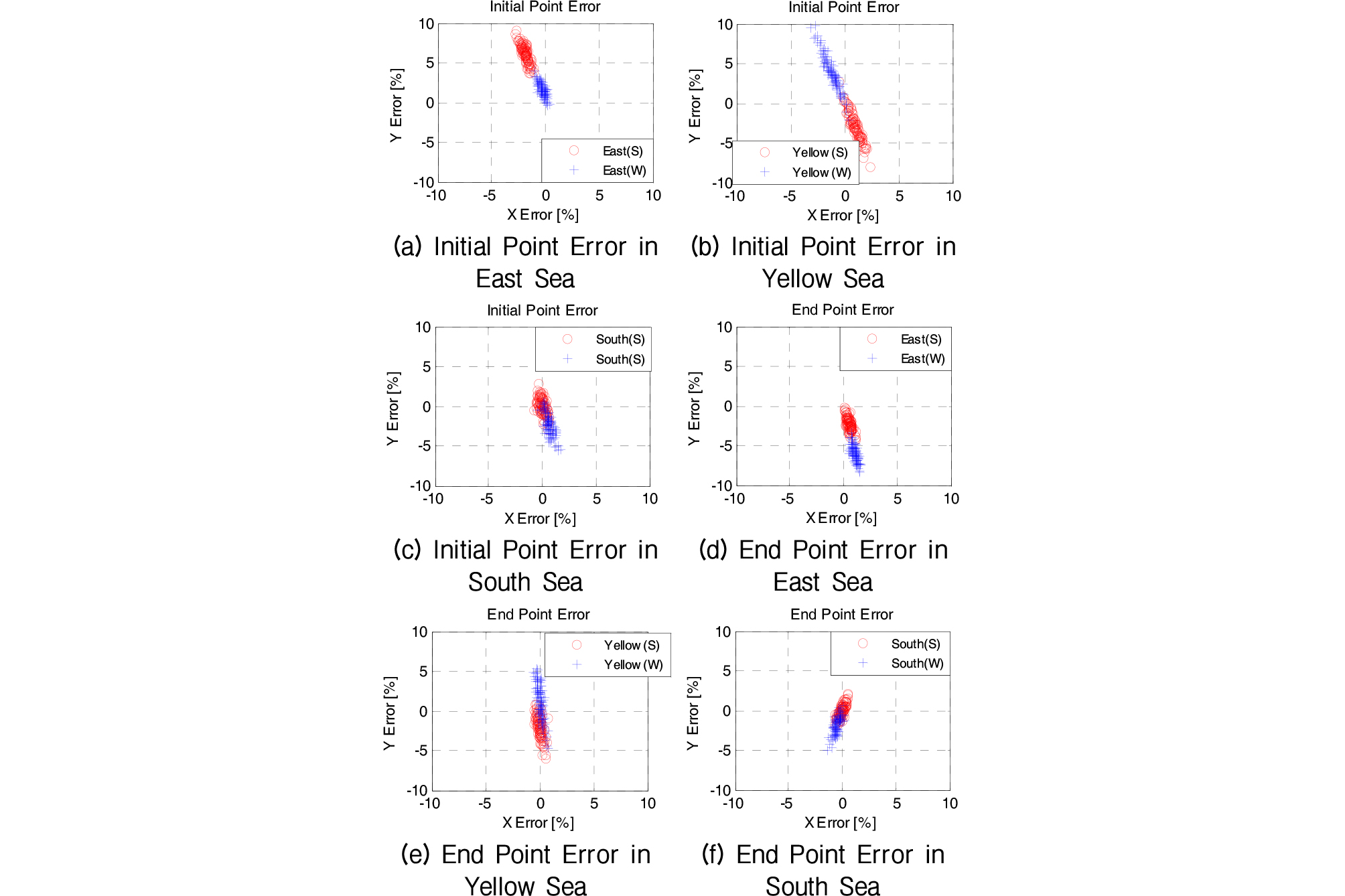
Table 1. Mean and RMSE of normalized range error.
** W : Winter
Fig. 6와 Table 1을 보면 표적 탐지거리가 10 km 미만인 남해에 비해 표적 탐지거리가 20 km 또는 30 km 정도로 먼 서해와 동해의 경우 거리오차의 평균과 RMSE가 더 크게 나타나 TMA의 정확도가 다소 저하되는 것을 볼 수 있지만, 한국 모든 해역에서 RMSE 10 % 내로 표적기동을 잘 추정하는 것을 확인 할 수 있다.
4.3 표적방사소음에 따른 TMA 성능 분석
4장 2절에서 음파전달 모델을 이용한 TMA를 수행하면서 표적의 방사소음수준을 알고 있다고 가정하였다. 그러나 실제 환경에서는 표적의 방사소음수준을 알 수 없으므로 임의로 가정한 표적의 방사소음수준에 따라 TMA 결과의 정확도가 저하 될 수 있다. 이에 대한 영향성을 분석하기 위해 가정한 표적의 방사소음수준을 실제보다 –18 dB ~ +18 dB 범위에서 변화시켜가며 TMA를 수행하였다.
각 해역에서 TMA의 거리 규준화 된 RMSE를 Fig. 7에 나타내었고, 거리 규준화된 RMSE가 10 % 이내로 수렴하는 표적방사소음수준 범위를 Table 2에 나타내었다. Fig. 7과 Table 2를 보면 동해의 경우 방사소음수준을 140 dB보다 2 dB 초과하여 높게 가정하였을 경우 거리 규준화된 RMSE가 10 % 이상으로 크게 발생하지만, 방사소음수준을 140 dB보다 낮게 가정하였을 경우 거리 규준화 된 RMSE가 10 %내로 유지되는 것을 볼 수 있다. 이는 동해에서만 존재하는 음수렴 구역으로 인해 다른 해역과 다르게 매 프레임마다의 SNR 변화 양상이 특수하게 나타나기 때문이다. 따라서 동해의 음수렴구역이 존재하는 탐지환경하에서 음수렴 구역에 위치한 표적의 경우 예상되는 표적의 방사소음수준을 낮게 설정하는 것이 더욱 정확한 TMA 결과를 얻을 수 있다. 그러나 동해와 달리 서해의 경우 방사소음수준이 140 dB 대비 0.5 dB, 남해의 경우 140 dB 대비 2.5 dB 만 달라지더라도 거리 규준화된 RMSE가 10 %이상 크게 발생하며, TMA 성능이 가정한 표적 방사소음수준에 크게 의존함을 확인할 수 있다. Fig. 5의 서해, 남해의 거리별 SNR 그래프에서 SNR이 거리에 따라 감소하는 경향을 보이며 매 프레임마다의 SNR 변화 양상이 비슷한 거리구간이 많이 존재한다. 이로 인해 가정한 표적 방사소음수준에 따라 다른 거리구간에서 표적이 기동한다고 산출될 수 있기 때문이다.
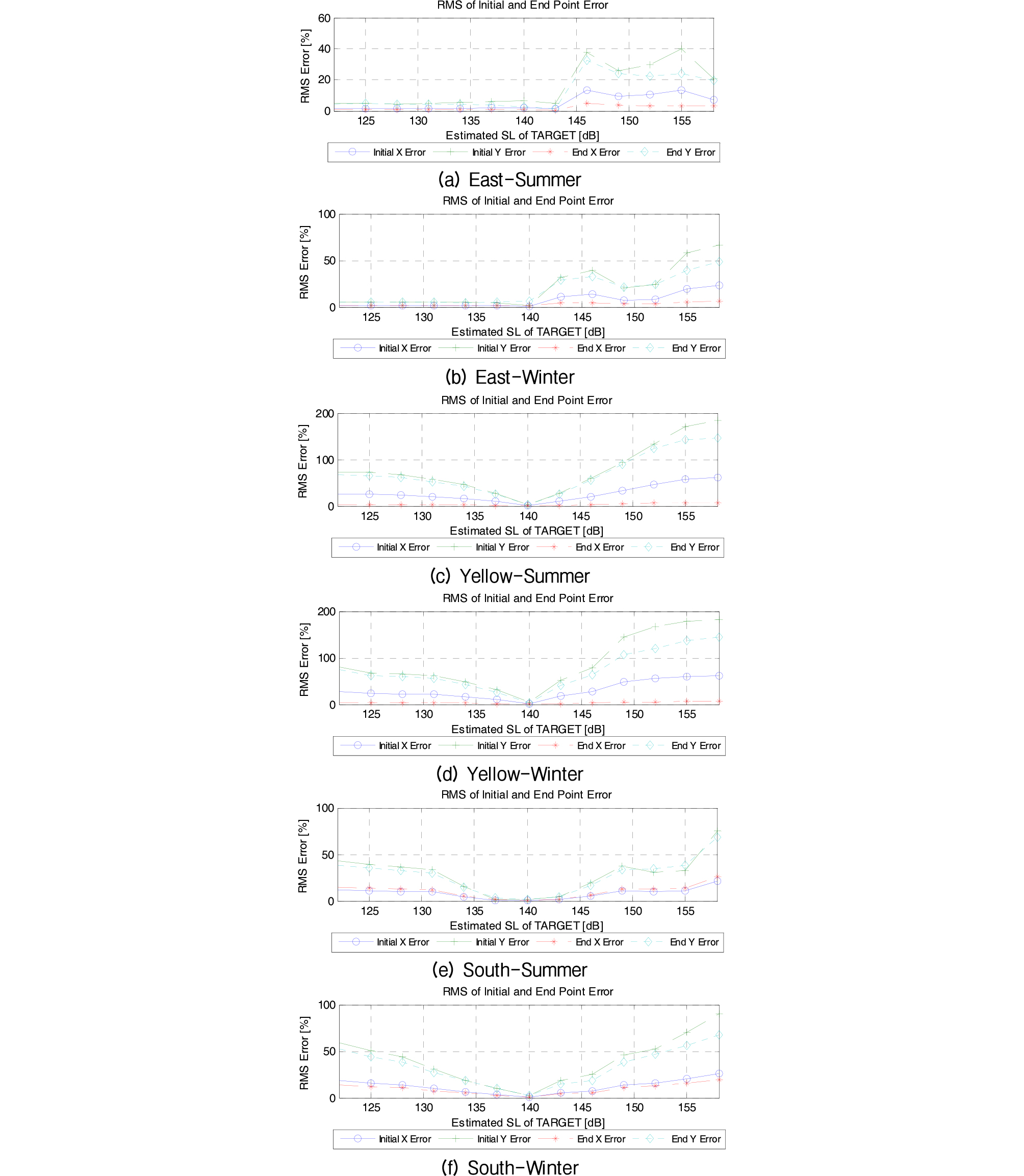
Table 2. Range of SL below 10 % RMSE..
** W : Winter
V. 결 론
본 논문에서 한국 해양환경에서 음파 전달 모델을 이용한 TMA의 성능을 확인하였다. 한국 해양환경에서 음파 전달 모델을 이용한 TMA를 수행할 시 표적의 기동 추정이 빠르고 정확하게 산출되어 TMA가 효과적으로 수행됨을 확인 하였다. 그리고 원거리 표적에 대해서도 우수한 TMA 정확도를 보임을 확인 하였다. 또한 동해의 음수렴구간이 존재하는 탐지환경하에서는 실제 표적의 방사소음수준보다 낮게 가정하여 TMA를 수행하는 것이 유리함을 확인하였고, 서해와 남해에서는 가정한 표적의 방사소음수준에 따라 TMA 결과의 정확도가 크게 저하되는 제한점을 확인 하였다.
한국 해역, 특히 동해의 음수렴구간이 존재하는 탐지환경하에서는 TMA에 음파전달모델을 적용하여 수행할 시 보다 정확한 표적 기동 정보를 얻을 수 있을 것으로 기대된다. 그리고 향후 표적의 방사소음수준을 정확하게 추정하는 기법에 대한 연구가 요구되며, 이를 접목할 시 한국 모든 해역에서 음파전달모델을 이용한 TMA의 적용이 효과적일 것으로 기대된다.
음파전달모델을 이용한 TMA은 실제 환경의 음파전달과 음파전달모델 간의 차이에 의해서도 그 성능이 좌우 될 수 있다. 향후 해상실험을 통해 음파전달모델과 실제 해양환경과의 차이에 따른 영향성 분석과 알고리즘 성능검증이 요구된다.
