

I. 서 론
II. 시간 지연 신호의 수치 모델링
III. GCC 기반 시간 지연 추정 방법[6]
IV. 단일 주파수 신호를 GCC에 적용할 때의 문제점
V. 전처리 방법들
5.1 경험적 모드 분해법
5.2 변동 모드 분해법
5.3 GCC를 위한 두 전처리 방법들
VI. 시뮬레이션
VII. 결 론
I. 서 론
두 개의 수신 신호 간의 시간 지연 추정은 소나 같은 수중 음향 신호처리 분야뿐만 아니라 여러 가지 통신 및 음성 처리 시스템 등에서 주요 신호원의 위치 파악을 위한 수단으로 사용하고 있다.[1,2,3]
현재 음원 추적 기술은 시간영역 및 주파수영역에서 연구가 많이 진행되고 있다. 대표적으로 널리 사용되는 방법에는 강도 차이를 이용한 방법,[4] TDOA (Time Difference of Arrival) 방법,[5,6] 빔포밍(beam- forming) 방법[7]등이 있다. TDOA을 이용한 방법은 계산이 간단하고 비교적 정확성이 좋아 시간 지연 추정에 널리 쓰이고 있다.[8]
본 논문에서는 TDOA 방법 중에서 일반 상호 상관 (Generalized Cross Correlation, GCC)을 사용하여 시간 지연 추정을 할 때 수신 신호가 단일 주파수 신호일 경우에 지연 시간 추정에 모호성이 증대되는 문제가 있는지를 알아본다. 그리고 신호 대 잡음비 개선으로 그 문제점을 우회하기 위한 전처리기의 도입을 제안한다. 그리고 시뮬레이션을 통해서 전처리기를 사용한 경우와 그렇지 않은 경우의 성능을 신호 대 잡음비를 달리하면서 비교하였고, 전처리기를 사용하였을 경우 협대역 단일 주파수 신호에 대해서 일반 상관기가 시간 지연을 추정할 수 있는 신호 대 잡음비의 범위가 전처리기를 사용하지 않을 때보다 의미 있게 늘어남을 보인다.
II. 시간 지연 신호의 수치 모델링
전통적인 시간지연추정 문제에 많이 쓰이는 간단한 신호 모델은 다음과 같다. 두 수신 채널에서 각각 수신된 신호를 Xi(t), i= 1,2라 한다면, 그 신호의 수치 모델은 다음과 같다.
| $$X_i(t)=\alpha_iS(t-\tau_i)+n_i(t),$$ | (1) |
여기서 αi는 원 신호, S(t)가 i번째 채널에 도달할 때의 감쇠 계수이고, τi는 원 신호가 i번째 채널에 도달할 때까지의 전파시간이다. 또 ni(t)는 i번째 채널에 부가된 잡음이다. 이 모델에서 S(t), ni(t)는 영 평균이고, 상호상관(cross correlation)이 없고, 시간에 따라 통계적 성질이 변하지 않는 가우시안 신호이다. 두 채널간의 상대적인 시간 지연은 이다.
III. GCC 기반 시간 지연 추정 방법[6]
GCC는 가중치를 사용하는 상호상관 방법이다. 주파수 영역에서 두 수신기 신호들 간에 상호 상관을 구한 후에 가중치를 곱하는 과정을 더하여 신호의 스펙트럼의 영향을 배제하는 효과를 갖는다. GCC 기반의 시간 지연 추정 과정을 Fig. 1에 나타내었다.
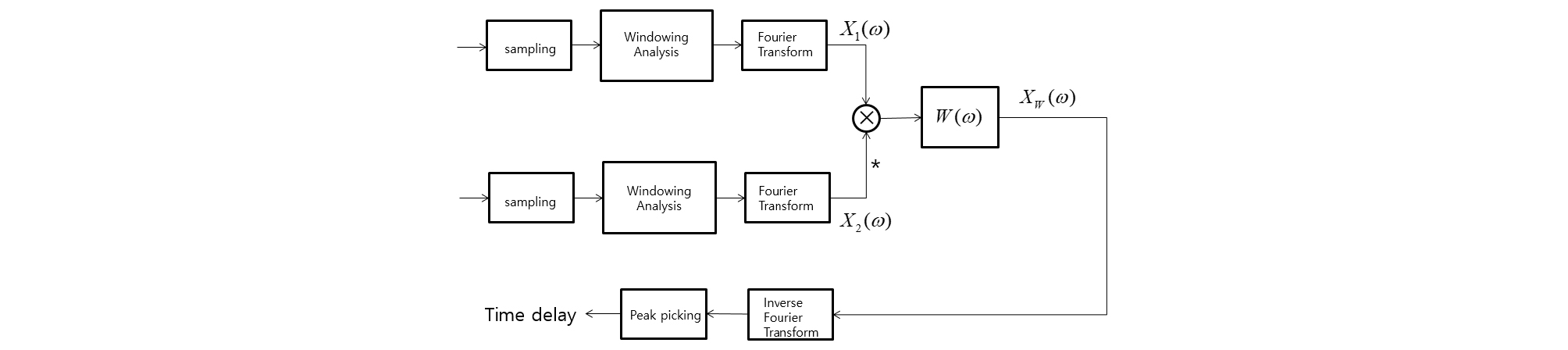
Fig. 1의 GCC 방법을 간략히 기술하면 다음과 같다. 두 개의 마이크에서 받은 신호 X1(t)과 X2(t) 사이의 상호상관도는 다음 식에 의해 얻어진다.
| $$R_{X_1X_2}(\tau)=\frac1{2\pi}\int_{-\infty}^\infty{W(\omega)X_1(\omega)X_2^\ast(\omega)e^{i\omega\tau}}d\omega,$$ | (2) |
여기서 *는 공액복소수이다. 위 식에서 W(ω)는 주파수축에서 구한 가중 함수이다. 이 가중 함수에 따라서 GCC를 좀 더 세분화해서 부른다. 이를 Table 1에 나타내었다.
Table1에 나타낸 가중 함수 Generalized Cross Correlation-Phase Transform(GCC-PHAT)와 Generalized Cross Correation-Smoothed Coherence Transform(GCC-SCOT)은 일종의 주파수 성분 백색화 과정임을 알 수 있다. 이와 같은 주파수 성분 백색화 과정을 거치면 두 신호 간의 상대적인 지연 정보가 들어 있는 위상만 남고 크기 성분은 일정하게 유지된다. 따라서 이런 가중 함수를 통한 후에는 Fig. 1과 같은 역 퓨리에 변환을 하면 Fig. 2와 같이 두 수신기 사이의 시 지연을 첨두치로 하는 결과를 얻을 수 있다. 그 외에 Table 1에서와 같이 가중 함수를 ‘1’로 하면 GCC는 전형적인 상호 상관 함수와 같은 결과를 얻을 수 있다.

IV. 단일 주파수 신호를 GCC에 적용할 때의 문제점
Table 1에서 GCC-PHAT와 GCC-SCOT은 주파수 도메인에서 주파수 성분 크기로 나누는 연산을 통해서 백색화를 하고 Eq. (3)과 같이 위상만을 이용하여 시간 지연을 추정하는 것이라고 요약할 수 있다.
| $$X_W(\omega)=e^{-j\omega\tau_{12}}.$$ | (3) |
그러나 수신 되는 신호가 단일 주파수 신호인 경우 협대역 신호이기 때문에 위상이 ωτ12인 주파수 구간이 전체 주파수 중 극히 일부에 지나지 않게 된다. 따라서 Fig. 1에 따라서 극히 일부 주파수 구간에서만 Eq. (3)과 같은 신호를 역퓨리에 변환하여 얻는 GCC 값은 실제 신호 간 지연 시간을 추정할 수 없는 경우가 광대역 신호를 수신하였을 때보다 훨씬 증가하게 된다. 따라서 단일 주파수 신호를 수신할 때는 가중치 함수를 ‘1’로 고정하여 사용하는 것이 나머지 두 가지 가중치 함수를 사용하는 것 보다 더 안정적인 결과를 얻는다.
가중치 함수를 1로 고정하여 사용할 때에도 상호 상관 시간 지연 추정기에서 단일 주파수 신호를 수신하여 시간 지연량을 추정할 때는 광대역 신호를 수신하여 시간 지연량을 추정할 때보다 추정 결과의 항상성이 줄어든다. 즉 반복된 추정 결과 일정한 값에 위치하지 않고 참 값 주변에 퍼져있는 현상이 생기게 된다. 이는 상호 상관식과 모호 함수식을 서로 비교하면 알 수 있다. 소나나 레이더에서 사용하는 발신 신호의 탐지의 성능을 알기 위해서 사용하는 식으로써 시간 추정 성능의 정확성 및 도플러 추정의 정확성을 알 수 있게 해 준다.
Eq. (4)에 표시된 모호 함수와 Eq. (5)에 표시된 상호 상관 함수를 비교해보자.[10]
| $$\chi(\tau,f_d)=\int_{-\infty}^\infty{x_1(t)e^{j2\pi f_dt}x_2^\ast(t-\tau)dt},$$ | (4) |
여기서 fd는 도플러 주파수 이다.
| $$R_{x_1x_2}(\tau)=\int_{-\infty}^\infty{x_1(t)x_2^\ast(t-\tau)dt}.$$ | (5) |
위 두 식을 비교해 보면 호 상관 함수를 도플러 주파수가 없는 신호에 대한 모호 함수임을 알 수 있다.
다음 식은 단일 주파수 신호의 ‘0’ 도플러에서의 모호 함수이다.[10]
| $$\left|\chi(\tau,0)\right|=\left|1-\frac{\left|\tau\right|}T\right|,\;\left|\tau\right|\leq\;T,$$ | (6) |
여기서 T는 신호의 길이이다. Fig. 3에 단일 주파수 신호의 모호 함수 결과를 보였다.
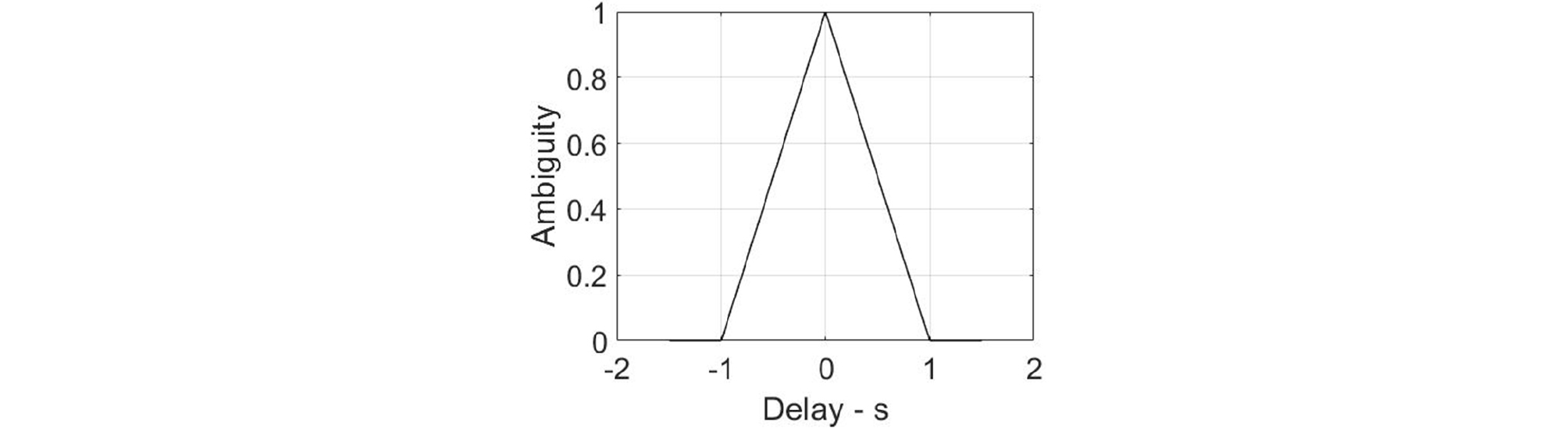
Fig. 3을 보면 모호성의 범위가 (±신호 길이)와 같다. 즉 긴 길이의 단일 주파수 신호를 사용하면 모호 구간이 길어지고, 짧은 길이의 단일 주파수 신호를 사용하면 모호 구간이 짧아진다. 따라서 긴 단일 주파수 신호를 사용하면 시간 지연 추정 결과가 위치할 수 있는 범위가 넓어지고, 짧은 단일 주파수 신호를 사용하면 시간 지연 추정 결과가 위치할 수 있는 범위가 좁아지게 된다. 보통 단일 주파수 신호는 목표물 운동성을 관측하기 위해서 사용하므로 도플러 주파수 추정에 중점을 둔다. 따라서 신호 길이를 길게 쓸수록 유리한 상황이다. Eq. (7)은 ‘0’ 도플러에서의 선형 주파수 변조(Linear Frequency Modulation, LFM) 신호의 모호 함수이다.[10]
여기서 T는 신호의 길이이고, μ는 LFM의 주파수 변화율이다. Fig. 4에는 주파수 변화율이 μ인 LFM 신호의 모호 함수를 보였다.
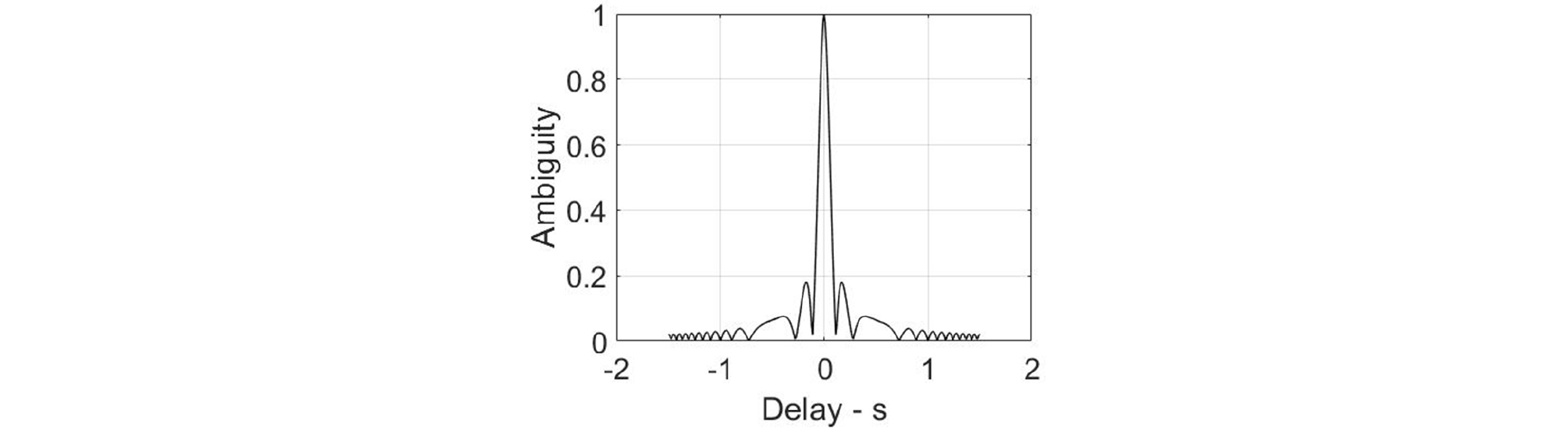
Fig. 4를 보면 모호성의 길이가 ±1/μT이다, 즉 단일 주파수 신호와 같은 길이의 신호를 사용해도 주파수 변동률을 크게 사용하면 훨씬 좁은 모호 구간이 형성될 수 있음을 알 수 있다. Figs. 3과 4를 보면 단일 주파수 신호에 대해서 일반 상호 상관기로 시간 지연을 추정할 때 단점이 있음을 알 수 있다. 그러나 같은 모호성 구간을 갖는 단일 주파수 신호라 하더라도 신호 대 잡음비가 높은 경우 신호 대 잡음비가 낮은 경우보다 좀 더 참값 주변에 가까이 추정치들이 모이는 경향이 있다. 본 논문에서는 전처리 방법을 사용하여 수신된 신호의 신호 대 잡음비를 개선하는 방법을 사용하여 일반 상호 상관에 의한 시간 지연 추정 성능을 개선하고자 한다.
V. 전처리 방법들
많은 연구자들이 신호에 포함된 다양한 주파수를 분석하여 주파수별로 신호를 분리하고자 하는 연구가 지속적으로 진행되었다. Huang et al.은 특정 신호를 고주파 신호부터 저주파 신호까지 순차적으로 추출하는 경험적 모드 분해법(Empirical Mode Decomposition, EMD)을 제안하였다.[11] 최근에 Dragomiretskiy와 Zosso는 경험적 모드 분해법의 단점을 보완한 변동 모드 분해법(Variational Mode Decomposition, VMD)을 제시하였다.[12]
변동 모드 분해법은 신호를 여러 개의 협대역 모드의 합으로 이루어져 있다고 가정하고, 각각의 모드를 분해하는 방법이다. 변동 모드 분해법은 매 순간마다 신호 평균을 사용하는 경험적 모드 분해법에 비하여 주파수 탐색 및 분리(tone detection and tone separation)에 탁월한 성능을 보인다.[12]
5.1 경험적 모드 분해법
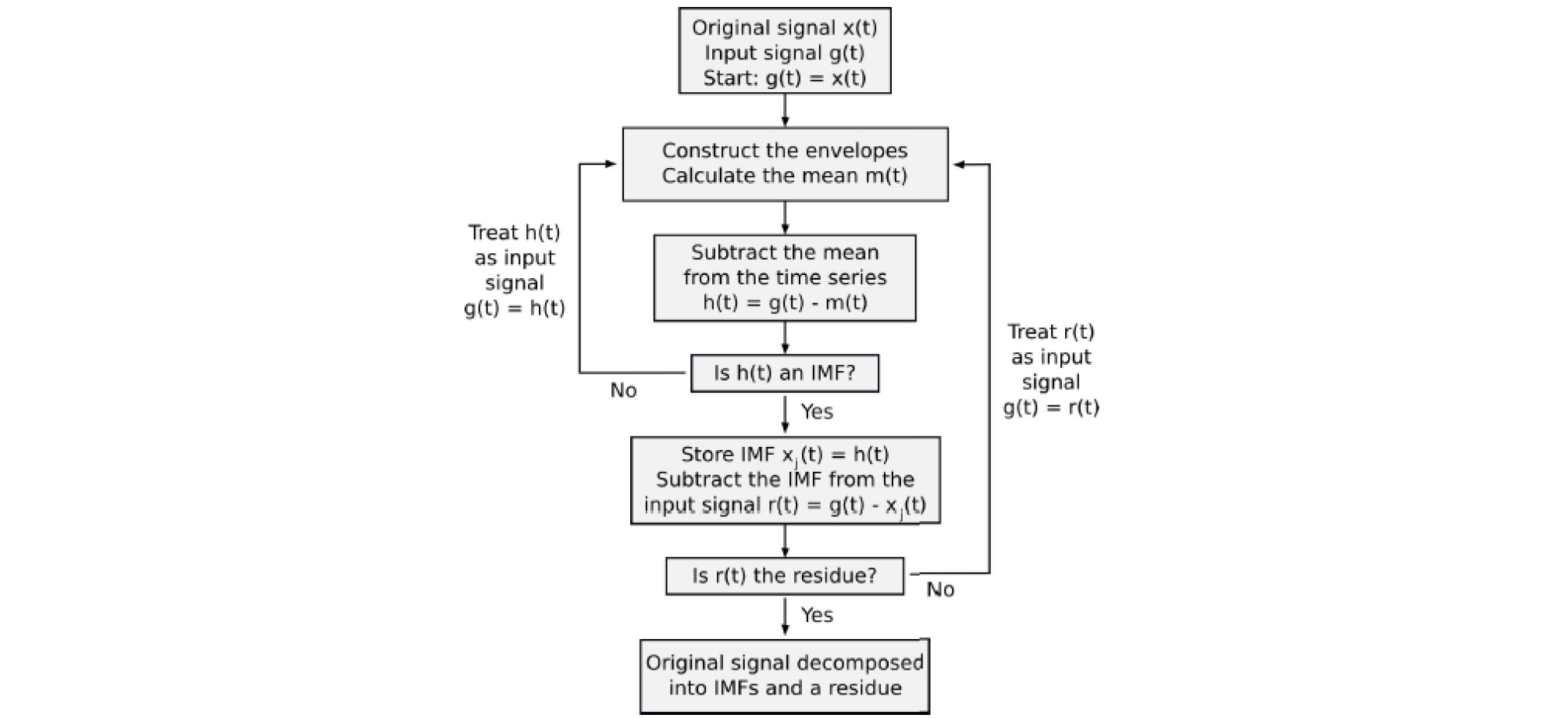
경험적 모드 분해법은 어떤 복잡한 신호를 유한개의 서로 다른 고유 모드 함수들(Intrinsic Mode Functions: IMF)로 분해하는 방법이다.[11] 분해가 시간영역에서 이루어지기 때문에, 원 신호 에서 기저 함수들이 발생하는 자기 적응 방법 이다. 그리고 다양한 국소적 시간 척도(local time scale) 에 기반 한 분해로 인해, 비선형이고 비정상인 신호 처리 에 적용될 수 있다. 경험적 모드 분해법는 고유 모드 함수를 추출하는 과정을 통해 원 신호를 유한개의 고유 모드 함수들로 분해하며, 분해된 고유 모드 함수들은 선형 결합을 통해 원 신호로 복원 될 수 있다.
정의 5.1 경험적 모드 분해법에서의 고유 모드 함수란
고유 모드 함수를 정의하기 위해 다음 두 가지 조건 을 만족해야 한다.[11]
(1) 전체 데이터 세트에서 극한값의 수와 영교차 수는 같거나 최대 한 개만 달라야 한다.
(2) 어느 지점에서 든 로컬 최대 및 최소의 포락선(envelope)의 평균값은 0이다.
이러한 조건을 만족하는 첫 번째 고유 모드 함수는 고주파수 성 분을 나타내고 이후 고유 모드 함수는 이전 고유 모드 함수보다 낮은 주파수를 나타낸다. 결국 마지막 고유 모드 함수는 가장 낮은 저주파수 성분을 나타낸다. 경험적 모드 분해법에 의해서 고유 모드 함수들을 구하는 경험적 모드 분해법의 순서는 다음과 같다.
위의 고유 모드 함수들로 분해된 성분들은 Eq. (8)과 같이 고유 모드 함수 성분들[xi(t)]과 그 때까지의 나머지[r(t)]의 합으로 나타낼 수 있다. 즉, 신호 열에서 데이터를 분해할 수 있고, 분해한 값들을 통해 원래의 데이터를 합성할 수 있다.
| $$x(t)=\sum_{i=1}^nx_i(t)+r(t).$$ | (8) |
경험적 모드 분해법에서의 계산 과정을 Fig. 5에 보였다.
5.2 변동 모드 분해법
변동 모드 분해법의 목적은 대상 신호 f(t)를 여러 개의 고유 모드 함수(intrinsic mode function) 로 분해하는 것이다. 여기에서 내재 모드 함수는 아래와 같이 정의한다.
정의 3.1 변동 모드 분해법의 고유모드함수[12]
의 형태를 가지는 진폭 및 주파수변조 신호들(Amplitude – Modulated – Frequency –Modulated(AM-FM) signals)이다. 여기에서 ϕk(t)는 비감소함수이며, Ak(t)는 비음함수이다.
내재 모드 함수를 알기 위해서는 순간주파수함수인 ωk(t) : = 와 그에 해당하는 진폭함수 Ak(t)를 알아내는 것이 핵심이다. 따라서 변동 모드 분해법은 적절한 K개의 주파수 ω1, ω2, ... ,ωK 와 그에 대응하는 내재 모드 함수 u1(t), u2(t), . . . , uK(t)를 추정하는 과정이라고 요약할 수 있다. 단 여기에서 신호를 구성하는 내재 모드 함수의 개수 K는 알려져 있는 것으로 가정한다. Dragomiretskiy와 Zosso[12]는 변동 모드 분해법을 위해서 아래와 같은 최적화과정을 통해서 내재 모드 함수를 도출하는 방법을 제시하였다.
여기서 δ는 임펄스 함수(Dirac function), j2 = −1, 은 L2 거리, ∂t는 t에 대한 미분을 의미한다. ∗는 콘볼류션(convolution)을 의미한다. 따라서 위 식을 최소화하며 내재 함수를 구하는 것은 각 고유 모드 함수의 적절한 중심 주파수 {ωk}를 구하고 를 라는 제약조건하에서 구한다는 의미가 된다. Table 2에 그 과정을 요약하였다.
Table 1.
Variational mode decomposition algorithm.[12]
|
Initialize: ,,, n = 0. DO for k = 1:K end for k = 1:K end while . |
5.3 GCC를 위한 두 전처리 방법들
4절에서 단일 주파수 신호를 사용하는 GCC 시간 지연 추정에서 시간 지연 결과의 모호성이 넓게 존재하고, 신호 대 잡음비를 높여서 그 모호성을 좁힐 수 있다고 기술 하였습니다. 본 절에서는 수신한 단일 주파수 신호의 신호 대 잡음비를 개선하기 위해서 5.1절과 5.2절에서 기술한 두 가지 방법을 전처리기로 사용하는 GCC를 제안한다. 5.1절의 경험적 모드 분해법은 신호의 구체적인 특성을 고려해 넣지 않고 신호에서 형태학적인 특징을 제거하는 과정을 반복함으로서 신호의 고유 특징을 분해하는 방법인데 반해서 5.2절의 변동 모드 분해법은 신호 안에 있는 주기성 신호를 목표로 성분 분해하는 특징을 갖고 있다. 둘 다 신호에서 잡음을 제거할 수 있는 가능성을 갖고 있음을 알 수 있다.
아래 Fig. 6(a)와 Fig. 6(b)에는 각각 경험적 모드 분해법을 전처리기로 사용하는 GCC와 변동 모드 분해법을 전처리기로 사용하는 GCC를 보였다. 그리고 Fig. 6(c)에는 경험적 모드 분해법으로 먼저 잡음을 감소시키고, 그 후에 변동 모드 분해법으로 주기성 신호를 추출하도록 두 가지 전처리기를 차례로 설치한 GCC도 보였다. 마지막으로 Fig. 6(d)에는 변동 모드 분해법으로 주기성 신호를 복원하고 , 그 후에 경험적 모드 분해법으로 잡음을 감소시키도록 두 가지 전처리기를 차례로 설치한 GCC를 보였다.
VI. 시뮬레이션
모의실험을 위해서 두 수신 채널을 위한 신호 열을 두 종류로 발생시킨다. 비교실험을 위한 신호발생을 위해서 첫 번째 채널 신호 X1(t)은 f0를 중심 주파수로 하는 100 msec와 1 s의 협대역 Continuous Wave (CW) 신호로 발생시켰다. 두 번째 채널 신호는 X1(t)과 11 샘플 뒤진 신호로 모델 하였다. 즉, X2(t) = X1 (t−11)이다. 각 신호 X1(t)과 X2(t)에는 두 백색 가우시안 잡음, n1(t)과 n2(t)가 각각 부가되었다. 이들 부가 잡음들은 서로 상관관계가 없도록 하였다.
본 비교 실험에서는 가중 함수를 ‘1’로 적용한 GCC를 기본형으로 하고, 그 기본형의 앞에 경험적 모드 분해를 전처리로 설치한 Fig. 6(a)와 같은 GCC 및 기본형의 앞에 변형 모드 분해를 전처리로 설치한 Fig. 6(b)와 같은 GCC 기본형에 경험적 모드 분해법 전처리기와 변형 모드 분해 전처리기를 차례로 설치한 Fig. 6(c)와 Fig. 6(c)와 전처리기 순서를 바꾼 Fig. 6(d)를 전처리기 없이 가중 함수를 ‘1’로 적용한 일반 GCC와 서로 비교하였다. 비교 실험 시에 신호 대 잡음비를 20 dB부터 1 dB씩 줄여가면서 각 신호 대 잡음에 대해서 100회씩 반복 시행하여 결과를 얻었다.
Fig. 7에는 CW 신호의 길이가 100 msec인 단일 주파수 신호인 경우에 대해서 두 수신기 사이에 11 샘플 지연된 신호가 도래했을 때의 추정 결과 오차의 분산을 그래프로 표시하였다. 또 성능의 비교를 위해서 오차 분산 값이 –20 dB인 곳에 수평선을 그렸다. 이 기준선을 특별한 의미가 있는 것은 아니고 오차 분산이 갑자기 나빠지는 현상, 즉 문턱 현상이 일어나는 신호 대 잡음비를 쉽게 알아보기 위한 대강의 기준선 역할을 위한 것이다.
Fig. 7에서 보면, 일반 GCC는 신호대 잡음비 약 4 dB에서 오차 분산이 나빠지는 문턱 현상을 관찰 할 수 있다. 이에 비해서 경험 모드 분해법을 전처리기로 사용한 GCC의 경우 –1 dB에서 문턱 현상을 관찰 할 수 있다. 또 변동 모드 분해법만 전처리기로 사용한 GCC나 변동 모드 분해법과 경험적 모드 분해법을 차례로 전처리기로 사용한 GCC 및 경험적 모드 분해법과 변동 모드 분해법을 차례로 전처리기로 사용한 경우 모두 약 –10 dB에서 문턱 현상이 일어나는 것을 관찰 할 수 있다. 이로써 100 msec 길이의 CW를 사용할 때 제안한 전처리기를 사용하는 경우 GCC의 추정 성능을 향상시킨다는 것을 알 수 있다. 100 msec를 사용한 본 실험에서는 최대 9 dB의 성능 이득을 보였다. 다음 식을 통해서 위 이득을 기하학적 손실[14]만을 고려했을 때의 사용거리 증가로 환산하여 보면,
| $$20\log\left(\frac{r_{prerocess}}{r_{no-prerocess}}\right)=9\lbrack dB\rbrack,$$ | (10) |
여기서 rpreprocess는 전처리를 사용했을 때 사용 거리이고, rno-preprocess는 전처리를 사용하지 않았을 경우에 사용 거리이다. Eq. (10)을 풀면 전처리를 사용했을 때 사용 거리가 전처리를 사용하지 않았을 경우에 사용 거리보다 약 2.8배 더 멀리까지 사용할 수 있음을 알 수 있다.
Fig. 8에서는 CW 신호의 길이가 1 s인 단일 주파수 신호인 경우에 대해서 두 수신기 사이에 11 샘플 지연된 신호가 도래했을 때의 추정 결과 오차의 분산을 그래프로 표시하였다. 또 성능의 비교를 위해서 오차 분산 값이 –20 dB인 곳에 수평선을 그렸다. 이 시험은 Fig. 7의 결과를 얻은 실험 때 사용한 CW 신호보다 유효 대역폭이 1/10로 준 더 협대역 신호를 사용한 경우를 의미한다. 따라서 Eq. (3) 과 Fig. 3에서 기술한 것과 같이 모호 범위가 10배 넓어지게 되어 단일 주파수 신호를 신호에 대한 GCC의 성능을 더 열화될 것이 예상된다.
Fig. 8에서 일반 GCC는 약 9 dB의 문턱 현상이 일어남을 관찰 할 수 있다. 이에 비해서 경험 모드 분해법을 전처리기로 사용한 GCC의 경우와 경험적 모드 분해법과 변동 모드 분해법을 차례로 전처리기로 사용한 경우 7 dB에서 문턱 현상이 발생하였다. 또 변동 모드 분해법만 전처리기로 사용한 경우와 변동 모드 분해법과 경험적 모드 분해법을 차례로 전처리기로 사용한 GCC는 약 5 dB에서 기준선을 통과하였다. 이 실험에서도 1 s 길이의 CW를 사용할 때도 제안한 전처리기를 사용하면 GCC의 추정 성능을 향상시킨다는 것을 알 수 있다. 1 s CW를 사용한 본 실험에서는 최대 4 dB의 성능 이득을 보였다. 또 이 이득을 Eq. (10)을 사용하여 사용거리 증가로 환산하여 보면, 전처리를 사용했을 때 사용 거리가 전처리를 사용하지 않았을 경우에 사용 거리보다 약 1.6배 더 멀리까지 사용할 수 있음을 알 수 있다.
Figs. 7과 8에서 도시한 모의실험 결과로부터 협대역 단일 주파수 신호에 대해서 GCC로 시간 지연 추정을 할 경우 경험적 모드 분해법이나 변동 모드 분해법을 사용한 전처리를 하는 것이 GCC 추정기의 작동 법위를 늘리는 데 효과적임을 확인하였다. 두 실험을 통해서 제안한 4가지 전처리기가 효과가 있임을 확인하였지만, 그 중에서 하나만을 선택한다면 변동 모드 분해법이 단일 주파수 협대역 신호엔 더 좋음도 관찰 할 수 있었다.
