

I. 서 론
압축센싱기반 표적 방위각 추정 기법은 신호의 희소도를 이용하여 입사신호의 표적 방위각을 추정하는 방법이다. 기존의 표적 방위각 추정 알고리듬의 경우 센서의 개수가 입사신호 개수보다 많아야 정상적인 표적 방위각 추정이 가능하고, 균일한 센서배열을 구성하는 일부 센서들의 고장이 알고리듬의 성능에 큰 영향을 미친다는 단점이 존재한다. 이에 반해 압축센싱 기반 표적 방위각 추정 기법의 경우 표적 방위각 추정 방식이 기존의 알고리듬과는 차별화되어있어 센서 개수에 제약이 없고 센서배열이 균일하지 않아도 된다는 큰 장점이 존재하기에 활발한 연구가 진행되고 있다.
압축센싱기반 표적 방위각 추정 알고리듬은 크게 신호데이터를 이용하는 데이터 fitting(피팅) 기법과 수신신호의 공분산 행렬을 이용하는 공분산 피팅(Sparse Spectrum Fitting, SpSF)기법이 존재한다.[1,2]
데이터 피팅 표적 방위각 추정 기법의 경우 신호원 개수만큼의 성분을 갖는 신호 벡터를 탐색 각도 개수까지 확장하여 신호원의 표적 방위각을 추정하는 문제를 주어진 조건보다 해의 개수가 더 많은 시스템으로 표현하고 희소 복원을 통해 신호원의 표적 방위각을 추정한다.
데이터 피팅 표적 방위각 추정 기법의 경우 단일 샘플을 이용한 데이터 피팅 표적 방위각 추정 기법이 가장 먼저 연구되었다. 최적화 변수의 개수가 탐색 각도 개수만큼 주어지기 때문에 적은 계산량이 요구된다는 장점이 있으나 추정 성능의 안정성이 낮다는 단점이 존재한다. 이를 보안하기 위해 다수개의 샘플을 이용한 데이터 피팅 표적 방위각 추정 기법이 연구가 되었으며 단일 샘플을 이용하는 경우보다 우수한 표적 방위각 추정 성능을 보인다. 하지만 최적화 변수의 양이 탐색 각도 개수 샘플 개수로 증가하게 되어 최적화의 계산량이 급증하게 되는 문제를 가지고 있다.
다수개의 샘플을 이용하는데 발생하는 계산량의 문제를 해소하기 위해 L1-SVD를 이용한 데이터 피팅 표적 방위각 추정 기법이 연구되었다. 특이 값 분해를 통해 최적화 변수를 탐색 각도 개수 신호원 개수로 감소시킴으로써 희소 복원의 계산량에 대한 부담을 줄였다.[1]
공분산 행렬을 이용한 압축센싱기반 표적 방위각 추정 알고리듬 또한 다수개의 샘플 이용에 따른 계산량을 감소시키기 위해 연구되었다. 신호원 개수만큼의 신호 공분산 행렬의 대각선 성분을 탐색 각도 개수만큼 확장하여 희소 복원을 수행한다. SpSF 알고리듬의 경우 충분한 샘플이 주어진 경우 최적화 가중치 값이 해석적으로 주어진다.[3] 더 나아가 Reference [4]의 연구에서는 충분한 샘플이 주어지지 않은 경우 SpSF 알고리듬의 최적의 가중치변수 값을 해석적으로 구하는 방법을 보인다.
Reference [5]의 연구에서는 시간 영역에 국한되어 있었던 SpSF 알고리듬을 주파수 영역으로 확장하고 주파수 영역에서의 SpSF 알고리듬의 표적 방위각 추정 성능을 기존의 빔형성 알고리듬 성능과 비교함으로써 주파수 영역으로 확장한 SpSF 알고리듬의 우수성을 보였다.
위의 압축센싱 기반 표적 방위각 추정 알고리듬은 볼록 최적화를 이용하여 추정하기에 다소 계산량이 많다는 단점이 있지만 희소도를 몰라도 된다는 이점이 있다. 하지만 기본적인 균등 선형 센서 배열을 이용하여 알고리듬의 표적 방위각 추정 성능을 보였으며 센서 배열의 고장에 대한 성능분석 연구가 미비하다는 한계가 있다.
이에 본 논문은 주파수 영역으로 확장된 압축센싱 기반 공분산 피팅 알고리듬의 유도과정을 다룸과 동시에 센서배열의 고장 및 비균일 센서 배열환경을 반영하기 위한 각 상황에 맞는 센서 어레이 매니폴드를 구현하여 수신신호의 구현 과정을 보인다. 또한 기존의 대표적인 표적 방위각 추정 알고리듬인 Conventional BeamForming(CBF) 그리고 Minimum Variance Distortionless Response(MVDR)과 주파수 영역으로 확장된 SpSF 알고리듬의 표적 방위각 추정 성능 비교함으로써 센서 배열의 고장 및 비균일 센서 배열 환경에 대한 주파수 영역으로 확장된 SpSF 알고리듬의 우수한 표적 방위각 추정 성능을 보인다.
II. SpSF 알고리듬
SpSF는 공분산 행렬을 피팅 하여 표적 방위각을 추정하는 방법이다. 센서 배열의 입사신호를 라 할 때, 공분산 행렬을 시간 평균으로 구현하면 아래의 수식과 같이 표현 가능하다.[6,7]
| $$\widehat{\boldsymbol R}=\sum_{i=1}^T\boldsymbol y\left(t_i\right)\boldsymbol y\left(t_i\right)^H.$$ | (1) |
는 샘플 개수이고 는 일 때의 수신 신호 데이터이다. Eq. (1)은 다음과 같이 어레이매니폴드 와 신호공분산행렬 그리고 잡음 공분산 행렬 로 표현이 가능하다.
| $$\widehat{\boldsymbol R}=\boldsymbol A{\widehat{\boldsymbol R}}_s\boldsymbol A^H+\boldsymbol E.$$ | (2) |
샘플 수가 충분히 많은 경우 로 근사할 수 있으며 SpSF 알고리듬의 비용함수는 Eq. (3)과 같이 정의된다.
III. 주파수 영역으로 확장한 SpSF 알고리듬
시간영역의 수신 신호 데이터를 퓨리에 변환하고 번째 블록만을 취함으로써 구현한 주파수 영역의 수신 신호 행렬 은 다음과 같다.
| $${\mathrm Y}_b=\left[{\mathrm Y}_b(f_1){\mathrm Y}_b(f_2)\;\cdots\;{\mathrm Y}_b(f_{\mathrm N})\right]\cdot$$ | (4) |
신호 에너지가 존재하는 bin의 수신신호데이터를 으로 정의하고 이를 이용하여 , 개의 블록에 대한 주파수 영역에서의 공분산 행렬을 다음과 같이 정의할 수 있다.
| $${\widehat{\mathbf R}}_F=\frac1L\sum_{b=1}^L{\mathbf Y}_{\mathrm b}({\mathrm f}_{\mathrm j})\mathbf Y_{\mathrm b}^{\mathrm H}({\mathrm f}_{\mathrm j}).$$ | (5) |
위 식에서 보인 주파수 영역에서의 공분산 행렬을 SpSF 알고리듬에 적용함으로써 주파수 영역으로 확장한 SpSF 알고리듬을 정의할 수 있다. 블록 개수 이 충분히 많으면 와 같이 근사가 가능하며 주파수 영역으로 확장한 SpSF 비용함수는 Eq. (7)과 같이 정의된다.[7]
주파수 영역으로 확장한 SpSF 알고리듬은 가중치 의 값을 사용자가 주어진 상황에 맞게 설정함으로써 기존의 공분산 행렬과 알고리듬을 통해 얻은 주파수 영역의 신호 공분산 행렬 과 어레이매니폴드 와의 연산을 통해 구한 공분산이 흡사하도록 함과 동시에 희소성을 가지는 신호공분산 행렬 를 추정한다.
가중치 인 경우 사용자가 양의 정수 방향으로 값을 바꾸어가며 설정하게 된다. 해당 과정을 거치면서 각각의 값에 해당되는 신호공분산 행렬을 구하게 된다. 구한 신호 공분산 행렬들 중 Eq. (8)과 같이 정의가 가능한 관계식을 만족하는 가중치 를 찾고 그에 대응하는 신호공분산 행렬 을 선택하면 최적의 희소한 신호공분산 를 구할 수 있다.[6]는 주파수 영역의 잡음 공분산 행렬이다.
또한 SpSF 알고리듬에서 구현되는 신호공분산 행렬의 대각선 성분은 탐색하는 방위각 범위에 해당되는 모든 각도에 대응하는 신호파워를 의미한다. 실제 신호원의 입사각도에 해당되는 색인에는 신호 파워 값이 존재하고 나머지 색인에는 0에 가까운 값이 주어지므로 이를 이용하여 입사신호의 표적 방위각을 추정할 수 있다.
IV. 비균일 센서 배열 및 센서배열 고장 환경 설정
비균일 센서 배열 환경이 발생하는 이유는 크게 환경에 의해 비균일 배열로 설계를 하게 된 경우와 센서 배열 소자들의 고장으로 인해 균일 센서 배열이 비균일 센서 배열로 변하게 되는 경우로 분류할 수 있다. 첫 번째의 경우는 이용한 소자의 개수와 소자간의 간격을 송수신 환경에 적합하게 설정할 수 있어 표적 방위각 추정성능에 큰 변화가 없다. 그러나 고장으로 인한 센서 배열의 비균일화는 추정 성능 변화에 큰 영향을 준다.
고장으로 인해 발생한 비균일 센서 배열을 이용하여 표적 방위각 추정을 수행할 때는 사용자가 센서 고장을 인지하고 있는지에 대한 유무를 고려해야한다. 먼저 고장 나지 않은 선형 균일 센서 어레이 매니폴드를 수식화하여 표현하면 다음과 같다.
센서 배열의 고장을 모르는 경우, 사용자는 센서 배열로부터 얻은 모든 데이터를 이용하게 된다. 해당 데이터는 고장 난 센서 소자에 해당 되는 부분까지 포함하고 있으나 고장 난 소자에 해당되는 부분에는 실질적인 데이터는 존재하지 않는다. 예를 들어 고장 난 소자의 개수가 2개이고 센서 배열의 두 번째와 다섯 번째에 해당 소자들이 위치한다면 이 경우의 센서 어레이 매니폴드는 아래의 식으로 표현 가능하다.
센서 배열의 고장을 인지하고 고장 난 센서 소자들을 파악한 경우 사용자는 기존의 M개의 소자들로부터 얻은 데이터를 모두 사용하는 것이 아닌 M-2개의 소자들로부터 얻은 데이터만을 사용하게 된다. 이때의 센서 어레이 매니폴드는 다음과 같이 정의 가능하다.
Eqs. (8)과 (9) 그리고 (10)의 경우 수신 신호를 모의할 때 이용이 되며 하여 세 가지 경우에 대한 수신신호는 다음과 같이 표현할 수 있다.
| $${\boldsymbol Y}_B(f_j)=\boldsymbol A{\boldsymbol X}_B(f_j)+\boldsymbol N.$$ | (11) |
| $$\boldsymbol Y_B^{(1)}(f_j)={\boldsymbol A}_{\mathbf1}{\boldsymbol X}_B(f_j)+\boldsymbol N.$$ | (12) |
| $$\boldsymbol Y_B^{(2)}(f_j)={\boldsymbol A}_{\mathbf2}{\boldsymbol X}_B(f_j)+\boldsymbol N.$$ | (13) |
센서 배열의 고장이 발생하지 않은 경우의 수신신호는 Eq. (11)과 같이 모델링이 가능하다. 센서 배열에 고장 발생 시 사용자가 인지한 경우는 Eq. (13)를 이용하여 수신신호를 모델링 할 수 있다. 센서 배열의 고장을 사용자가 인지하지 못한 경우는 특정 센서 소자에 신호가 수신되지 못하지만 고장으로 인한 잡음 발생을 반영하기 위해 Eq. (12)과 같이 모델링을 하였다. 센서 배열의 경우 설정된 센서 고장률에 따라 랜덤하게 고장난 센서 소자가 배치되도록 하였다.
방향 탐지 알고리듬 구현 시 이용되는 센서 어레이 매니폴드의 경우 센서 고장이 발생하였으나 사용자가 인지하지 못한 경우 센서 고장이 발생하지 않은 경우와 동일하게 모든 센서 소자의 위상 차 데이터를 이용하며 사용자가 고장을 인지한 경우 고장이 발생한 센서를 제외한 위상차 정보만 이용하게 된다.
V. 수치 결과
시뮬레이션은 MATLAB을 이용하여 진행하였다. Sine 함수로 모의 신호를 발생시켰으며 모의실험은 크게 세 가지의 경우로 분류되어 진행되었다. 첫 번째 실험은 비균일 센서 배열에 대한 주파수 영역에서 구현된 SpSF 알고리듬의 표적 방위각 추정 성능을 보인다. 두 번째 실험의 경우 균일한 선형 센서 배열의 소자가 고장난 경우 사용자가 인지하지 못했을 때의 SpSF 알고리듬의 성능을 보인다. 세 번째 실험은 센서 배열의 소자가 고장난 경우 사용자가 인지했을 때의 SpSF 알고리듬의 성능을 보인다.
비균일 센서 및 센서 고장에 따른 주파수 영역으로 확장된 SpSF 알고리듬의 표적 방위각 추정 성능을 주파수 영역에서 구현된 CBF 알고리듬과 MVDR[7,8]의 표적 방위각 추정 성능과 비교함으로써 주파수 영역의 SpSF 알고리듬의 추정 성능을 분석한다.
첫 번째 실험의 신뢰성을 높이기 위해 비균일 센서 배열의 경우 센서 소자의 개수만 입력하면 소자간의 간격을 랜덤으로 설정하도록 설정하였다. 해당 설정을 통해 임의로 설정된 환경에서의 결과 값이 아닌 다양한 환경에서의 시뮬레이션 결과 값을 얻을 수 있다.
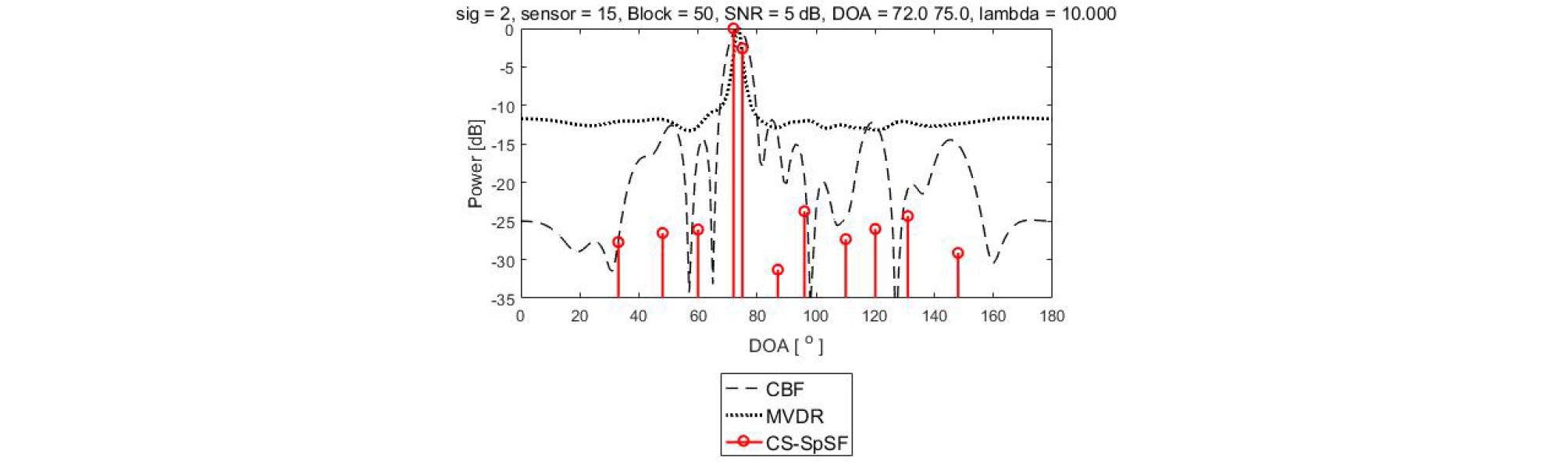
Figs. 1과 2의 경우 균일 센서 배열이 주어졌을 때 주파수 영역으로 확장한 SpSF 알고리듬, CBF, 그리고 MVDR의 표적 방위각 추정 결과를 보인다.
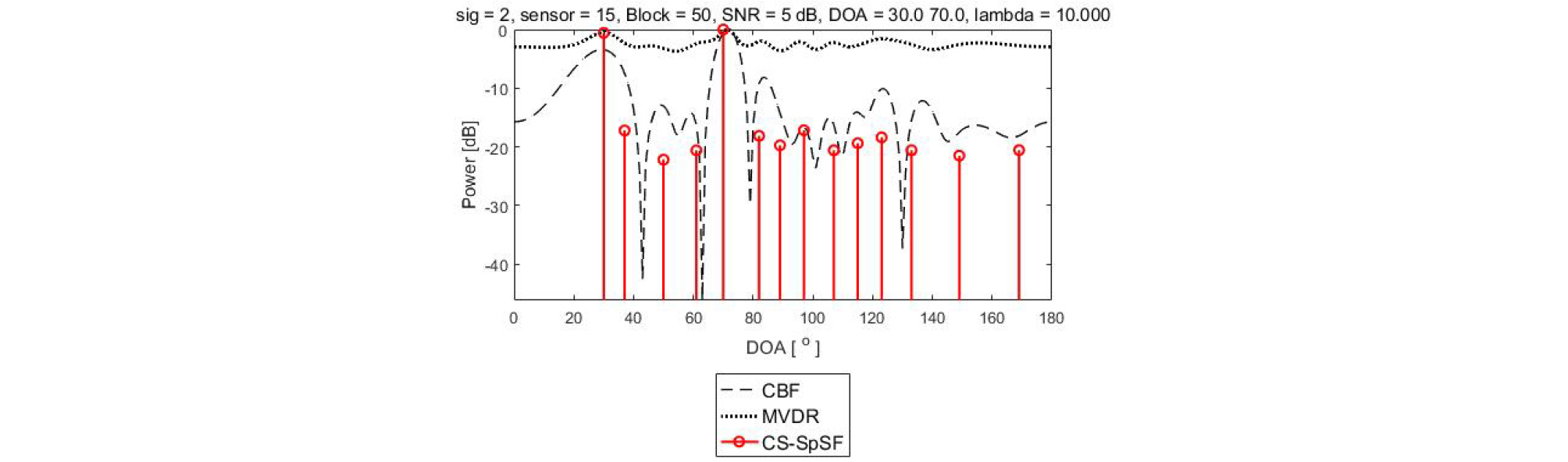
Figs. 1과 2의 경우 센서의 개수가 15개, 블록 개수가 50으로 설정된 경우의 각 알고리듬별 추정 결과 스펙트럼을 보인다. Fig. 1의 두 신호원은 30°와 70°에서 입사하고 있으며 해당 그래프를 통해 세 알고리듬 모두 두 신호원의 표적 방위각을 정확히 추정하는 것을 확인 할 수 있다.
Fig. 2의 경우 두 신호원이 인접한 경우의 각 알고리듬별 분해능을 보인다. 두 신호원은 72°와 75°에서 입사하고 있으며 위의 결과그래프를 통해 CBF와 MVDR의 경우 3° 간격의 두 신호원을 구분하지 못하는 것을 확인 할 수 있으며 주파수 영역으로 확장한 SpSF의 경우 정확히 두 신호원을 분해할 수 있음을 알 수 있다.
Figs. 3-5의 경우 센서의 개수가 5개 또는 10개로 주어지고 두 신호원이 20°와 70°에서 입사하고 블록 개수가 15개이며 센서간의 간격이 랜덤하게 설정되었을 때의 시뮬레이션 결과이다.
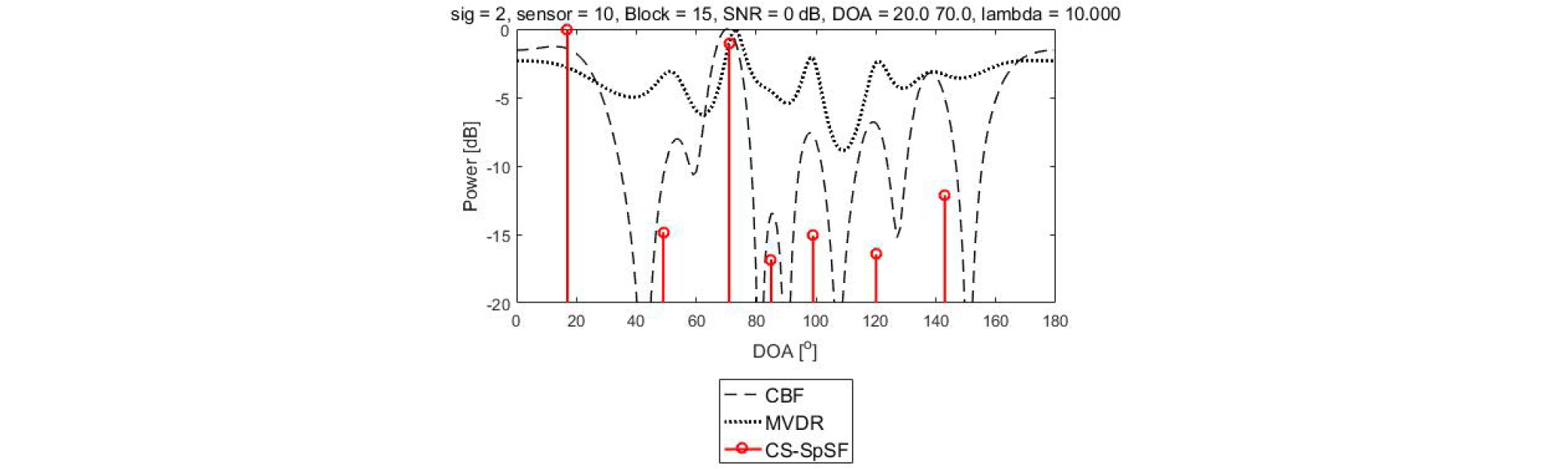
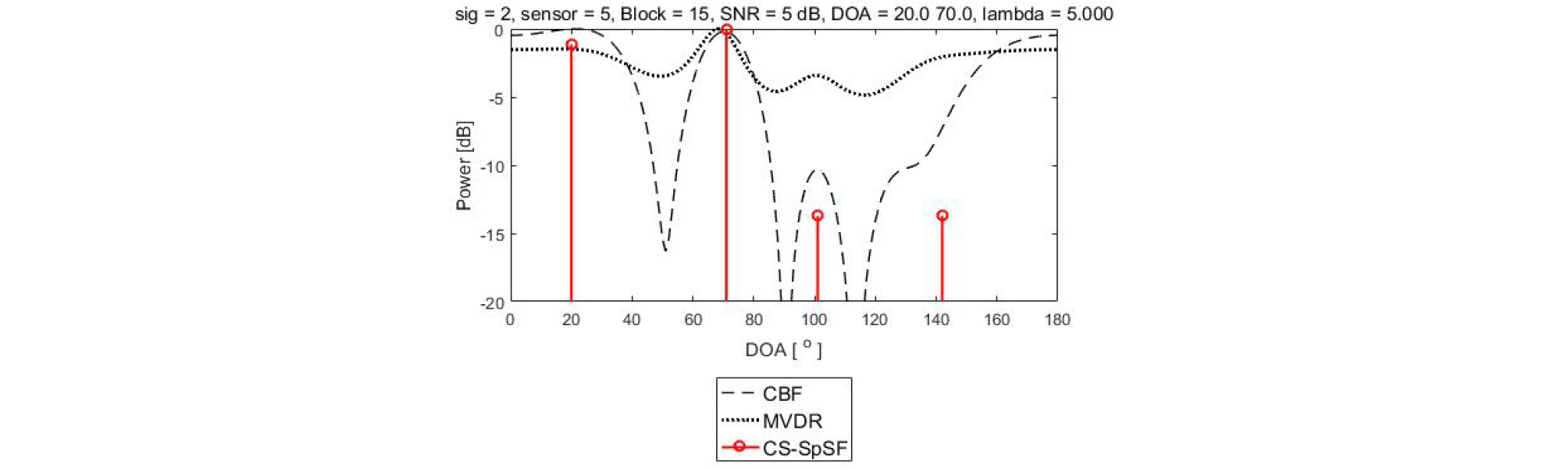
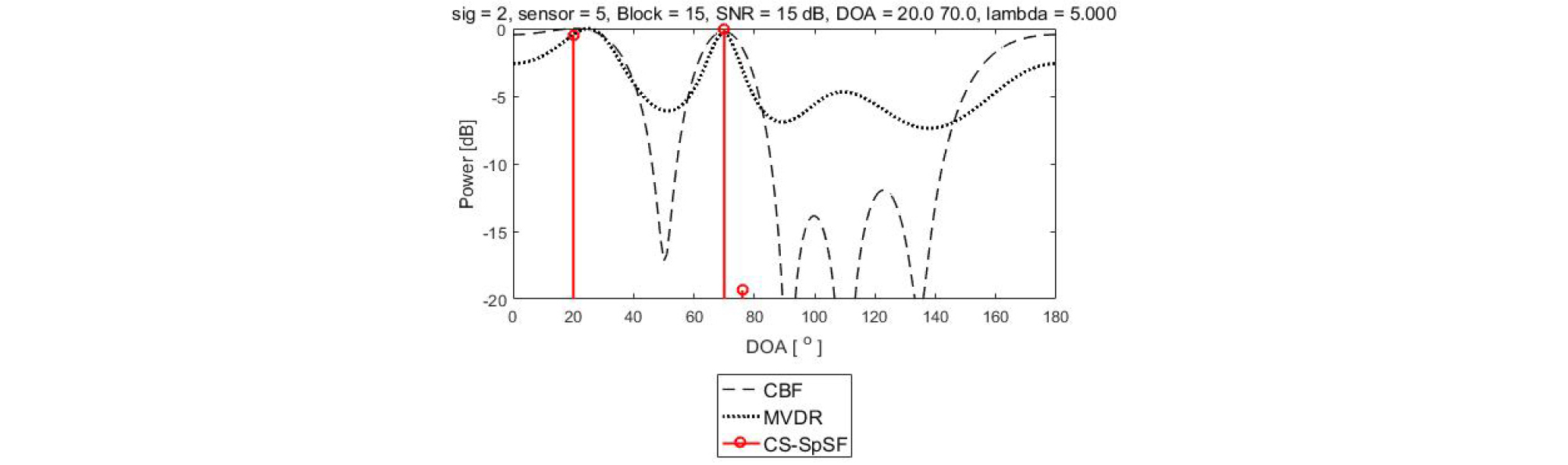
Fig. 3의 경우 센서의 개수가 10개이며 신호대잡음비(Signal-to-Noise Ratio, SNR)가 0 dB인 경우의 각 알고리듬의 표적 방위각 추정 성능을 보인다. CBF와 MVDR인 경우 실제 신호원의 표적 방위각 부근에서 최대값이 형성되기는 하지만 오차가 존재함을 확인할 수 있으며 SpSF 알고리듬의 경우 가짜 최대값이 존재하지만 정확하게 표적 방위각을 추정할 수 있음을 알 수 있다.
Figs. 4와 5의 경우 센서의 개수가 5개이며 신호대잡음비가 5 dB와 15 dB일 때의 표적 방위각 추정 결과를 보인다. CBF 알고리듬의 경우 두 신호원의 표적 방위각을 제대로 추정하지 못하는 것을 확인할 수 있으며 SpSF 알고리듬의 스펙트럼 동적 범위가 CBF나 MVDR에 비하여 현저히 큰 값을 가짐을 확인할 수 있다.
Figs. 6과 7의 경우 센서 배열이 비균일하게 설정된 경우의 각 표적 방위각 추정 알고리듬의 분해능을 보여준다.
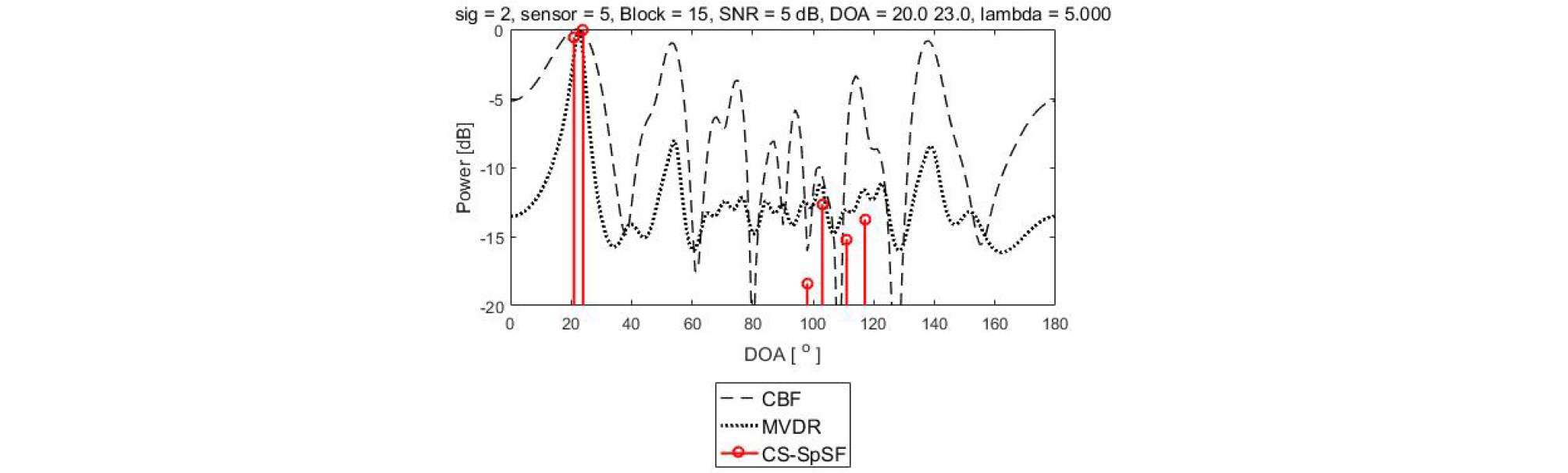
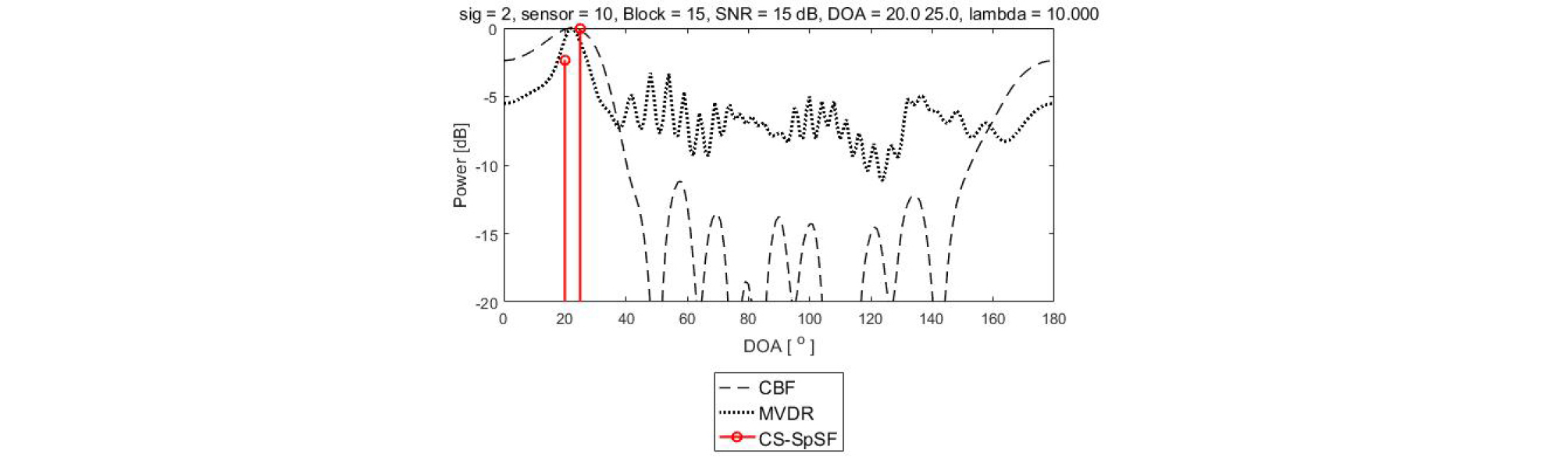
Fig. 6의 경우 센서의 개수가 5개이며 블록 개수는 15개이고 신호대잡음비가 5 dB일 때의 각 알고리듬의 표적 방위각 추정 결과를 보여준다. 해당 그림을 통해 기존의 표적 방위각 추정 알고리듬인 CBF와 MVDR은 20°와 23°에서 입사하는 두 표적 방위각을 전혀 분해하지 못하는 것을 확인할 수 있으며 SpSF 알고리듬인 경우 완벽하게 두 신호원에 대한 표적 방위각을 구분하여 추정하는 것을 확인할 수 있다.
Fig. 7의 경우 센서의 개수를 5개로 설정하고 신호대잡음비를 15 dB로 설정하였으며 두 신호원에 대한 표적 방위각이 20°와 25°인 경우의 각 알고리듬의 표적 방위각 추정 결과를 보여준다. 센서의 개수와 신호대잡음비가 모두 증가했음에도 불구하고 기존의 표적 방위각 추정 알고리듬인 CBF와 MVDR인 경우 여전히 두 신호원에 대한 표적 방위각을 모두 추정하지 못하는 것을 확인할 수 있다. 이에 반하여 SpSF 알고리듬은 정확하게 두 신호원의 표적 방위각을 구분하여 추정하는 것을 Figs. 4와 5를 통해 확인할 수 있다.
Figs. 8과 9는 센서 배열의 소자에 고장이 발생했지만 사용자가 이를 인지하지 못한 경우의 스펙트럼 결과를 각 알고리듬 별로 보인다.
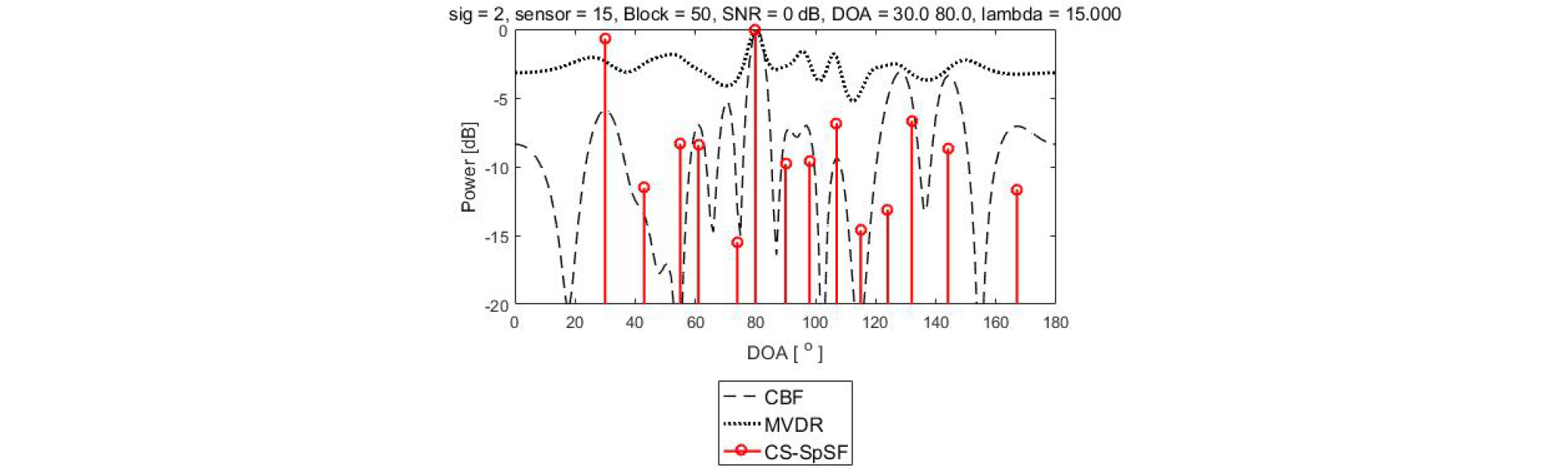
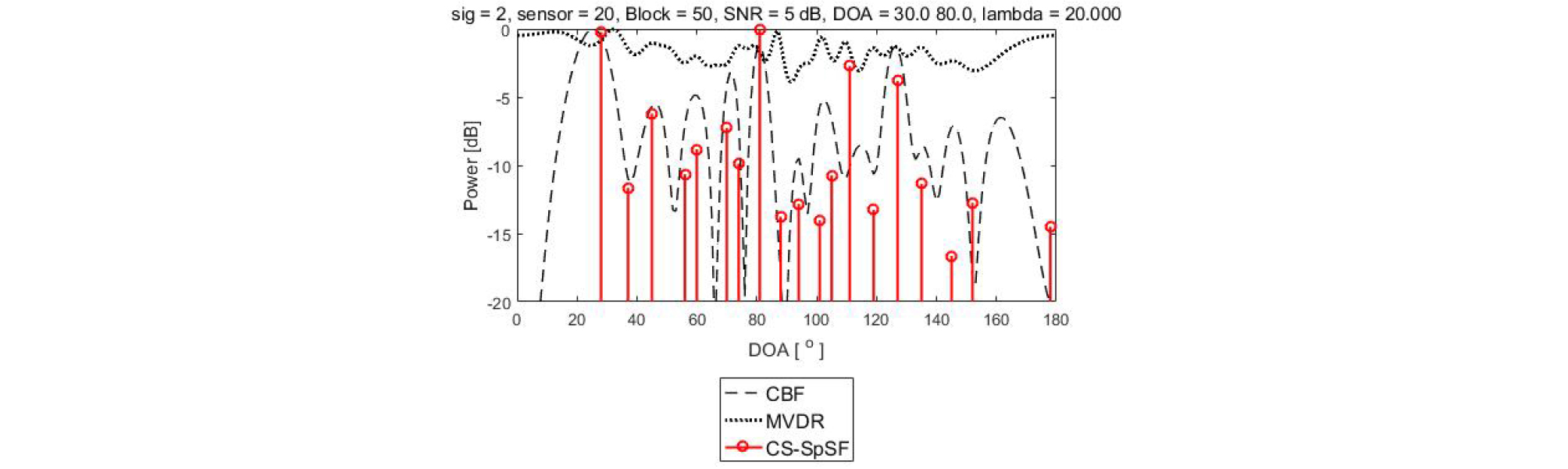
Fig. 8의 경우 블록의 개수가 50이고 신호대잡음비가 0 dB이며 15개의 센서 중에 임의의 4개의 센서가 고장 났을 때의 표적 방위각 추정 알고리듬 별 표적 방위각 추정 결과를 보인다. SpSF 알고리듬을 이용 시 두 신호원에 대한 표적 방위각을 정확히 추정할 수 있음을 확인 가능하며 기존의 표적 방위각 추정 알고리듬인 CBF와 MVDR의 경우 표적 방위각 추정에 오차가 발생한 것을 확인할 수 있다.
Fig. 9는 블록의 개수가 50개이고 신호대잡음비가 5 dB의 경우 20개의 센서 중 임의의 센서 10개가 고장 났을 때의 각 알고리듬의 추정 결과를 보인다. SpSF 알고리듬의 경우 가짜 최대값이 많이 생기지만 표적 방위각을 정확하게 추정한다. CBF의 경우 적은 오차를 보이고 있으나 MVDR 알고리듬인 경우 표적 방위각 추정이 불가능한 것을 확인할 수 있다.
Figs. 8과 9를 통해 일부의 센서배열의 소자에 고장이 발생하고 사용자가 이를 인지하지 못한 경우 SpSF 알고리듬의 표적 방위각 추정성능이 기존의 표적 방위각 추정 알고리듬인 CBF와 MVDR의 표적 방위각 추정 성능보다 더 우수함을 확인할 수 있다.
Figs. 10과 11의 경우 센서 배열의 소자에 고장이 발생했지만 사용자가 이를 인지했을 때의 표적 방위각 추정 결과를 각 알고리듬 별로 보인다.
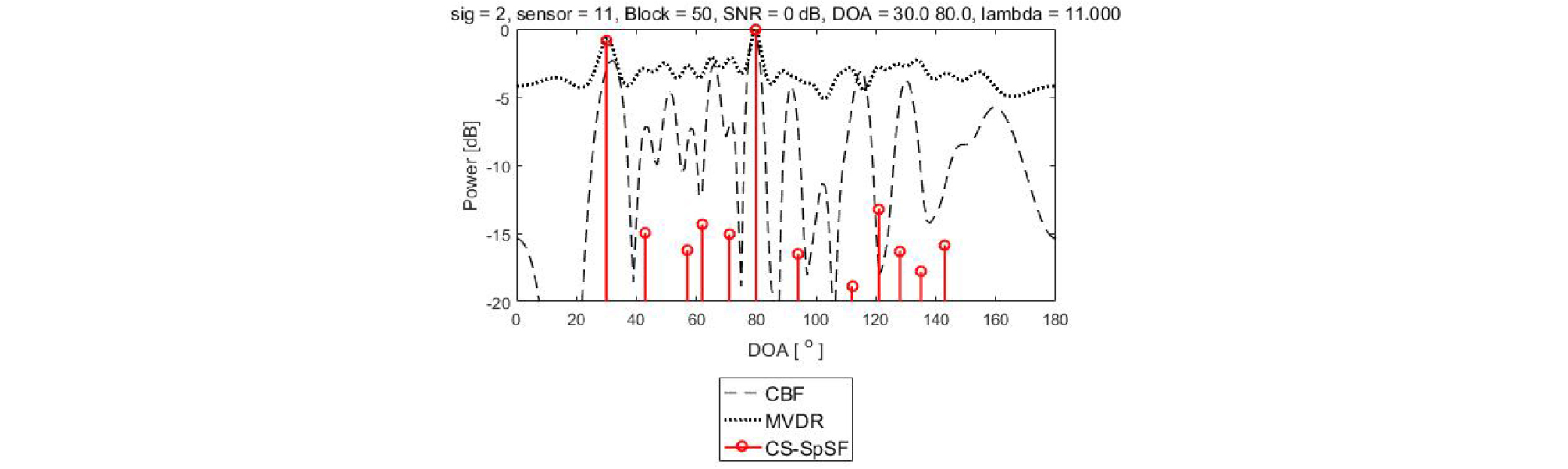
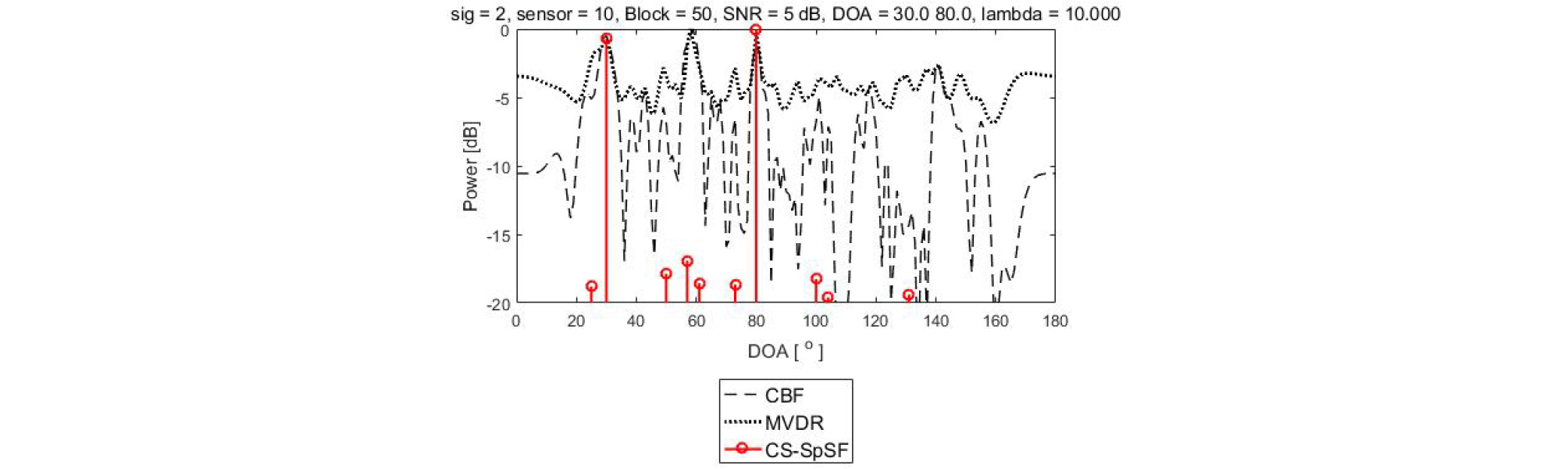
Fig. 10의 경우 블록의 개수가 50, 신호대잡음비 의 경우 0 dB이며 15개의 센서 소자 중 4개의 센서가 고장 이 발생하여 총 11개의 센서를 이용할 경우에 대한 각 알고리듬의 추정 결과 스펙트럼을 보인다. SpSF 알고리듬만이 두 신호원에 대한 표적 방위각을 정확히 추정 가능함을 Fig. 8을 통해 확인할 수 있으며 기존의 표적 방위각 추정 알고리듬인 CBF와 MVDR의 경우 정확한 표적 방위각 추정을 하지 못하는 것을 확인할 수 있다.
Fig. 11은 50개의 블록을 이용하며 신호대잡음비의 경우 5 dB로 설정하였으며 센서 배열은 20개의 소자 중 10개의 센서에 고장이 발생하여 총 10개의 센서를 이용할 경우에 대한 각 알고리듬의 추정 결과를 스펙트럼으로 보인다. Fig. 8보다 센서를 더 적게 사용하였으며 CBF와 MVDR의 경우 표적 방위각 추정에 있어 오차가 발생함을 확인할 수 있다. 이에 반해 SpSF 알고리듬의 경우 두 신호원에 대한 표적방위각을 정확히 추정할 수 있음을 Fig. 9를 통해 확인할 수 있다.
Figs. 10과 11을 통해 센서 배열의 일부 소자에 고장이 발생하고 사용자가 이를 인지하고 있을 경우 기존의 표적 방위각 추정 알고리듬인 CBF, MVDR의 추정 성능보다 SpSF 알고리듬의 추정 성능이 더욱 우수한 것을 검증할 수 있다.
VI. 결 론
본 논문은 주파수 영역으로 확장된 압축센싱 기반 SpSF 알고리듬의 유도과정을 다루었으며 센서 배열이 비균일하게 배치된 경우와 센서배열의 일부 소자에 고장이 발생한 경우에 대한 해당 알고리듬의 표적 방위각 추정 성능을 보였다. 센서배열의 고장을 반영하기 위해 각 상황에 맞는 센서 어레이 매니폴드를 구현하여 수신신호를 모델링하였다. 센서배열의 일부 소자에 고장이 발생한 경우의 모의실험은 사용자가 센서의 고장을 인지한 경우와 인지하지 못 할 때의 경우로 구분하여 모의실험을 진행하였다. 주파수 영역의 SpSF 알고리듬과 기존의 대표적인 표적 방위각 추정 기법인 CBF 그리고 MVDR의 추정 성능을 비교함으로써 비균일 센서 배열환경과 센서 배열의 일부 소자에 고장이 발생한 경우에 대하여 주파수 영역의 SpSF 알고리듬의 표적 방위각 추정 성능이 우수함을 보였다.
