I. 서 론
II. 기존 방법
2.1 LFM펄스를 이용한 수직지향 송․수신
2.2 GSFM 펄스
III. 제안한 방법
IV. 실험 및 결과
4.1 모의실험 환경
4.2 모의실험 결과
V. 결 론
I. 서 론
소나는 음향신호의 송신여부에 따라 능동소나와 수동소나로 나뉘며,[1,2] 90년대 이후 표적의 정숙화와 해상 교통량 증가로 인해 수동소나를 이용한 표적 탐지의 한계점이 드러나면서 능동소나에 대한 연구가 활발해 지고 있다.
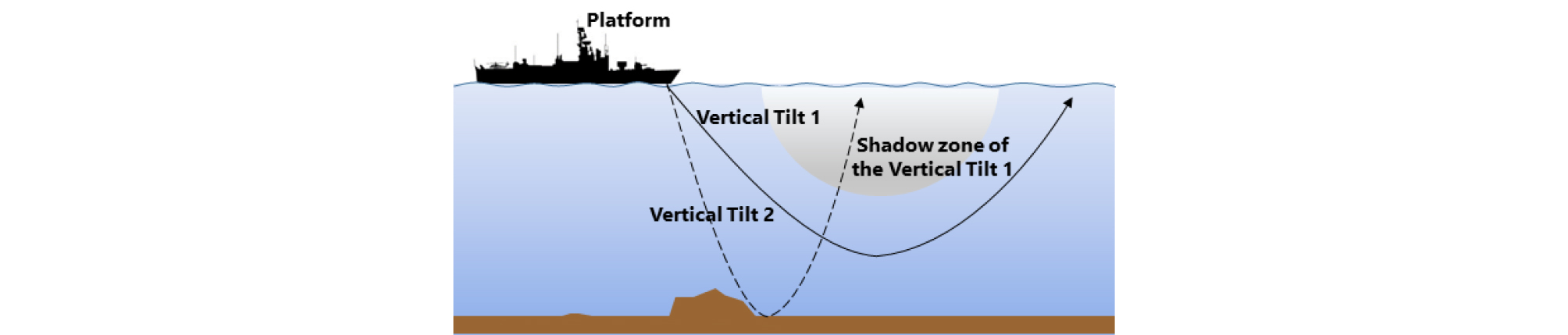
선체고정소나(Hull Mounted Sonar, HMS)는 함선의 선체에 고정되어 운용되는 소나 시스템으로 능동 및 수동 소나로 활용 가능하다.[3,4] 선체고정소나를 능동소나로 운용할 때 수직음속구조(Sound Velocity Profile, SVP)에 따른 음파의 전달 특성으로 인해 Fig. 1과 같이 수직송신 1의 경우 음파가 도달하지 않는 음영 구역이 발생하여 표적의 탐지가 불가능하다. 따라서 이러한 음영 구역을 감소시키기 위해 선체고정소나는 수직지향각(해수면과 이루는 각도로 해수면 아래가 양의 값을 갖도록 설정)을 조정하여 수직송신 2를 추가적으로 송․수신한다.
일반적으로 선체고정소나를 이용한 능동탐지 시, 거리-방위 추정을 위해 여러 개의 Linear Frequency Modulation(LFM) 부펄스를 주파수 대역 분리하여 운용한다. 이는 서로 다른 LFM 부펄스 간의 간섭을 제거하는 측면에서는 유용하지만 전체 시스템에서 사용가능한 주파수 대역이 한정되어 있기 때문에 각각의 부펄스가 사용하는 대역폭이 좁아지므로 시간 대역폭 곱이 감소하여 펄스의 탐지 성능이 저하되는 단점이 있다.
한편, 최근에 Hague와 Buck이 Sinusoidal Frequency Modulation(SFM)의 일반화된 형태인 Generalized SFM (GSFM)을 제안하였다.[5] GSFM은 거리-도플러 분해능이 모두 우수한 압정형태의 광대역 펄스로서, 파라미터 설정에 따라 서로 직교하는 부펄스를 생성할 수 있는 특징이 있는 것으로 알려져 있다.[5,6,7,8,9]
따라서, 본 논문에서는 GSFM 펄스의 직교성을 이용하여 선체고정소나의 수직지향 운용 시 펄스 간의 간섭을 제거하면서 시간 대역폭 곱을 최대화하는 운용 방안을 제안한다. GSFM 펄스는 펄스의 파라미터에 따라서 직교성을 보이는 펄스를 여러 개 만들어낼 수 있기 때문에 직교성을 갖는 GSFM 펄스를 서로 다른 수직지향각으로 송․수신할 경우 주파수 대역폭이 겹치더라도 상호간의 간섭을 억제할 수 있으므로 시간 대역폭 곱을 최대로 사용할 수 있다. 이러한 장점을 통해 얻은 신호처리 이득이 능동탐지 성능을 향상시킬 수 있음을 보인다.
II. 기존 방법
2.1 LFM펄스를 이용한 수직지향 송․수신
LFM 펄스는 거리 분해능이 높지만 도플러 분해능이 낮은 특성을 가지고 있다. LFM 펄스의 주파수는 시간에 따라 선형적으로 변화하며 아래와 같이 정의된다.
| $$s_l(t)=e^{j(2\pi f_\min t+\pi\frac BTt^2)},0\leq t\leq T,$$ | (1) |
여기서 은 해당 대역폭의 최소 주파수, 는 대역폭, 는 펄스의 길이를 나타낸다. 표적의 도플러도 탐지하기 위해 수직지향 송․수신을 할 때 LFM 부펄스 앞에 각각 Continuous Wave(CW) 펄스를 송신하기도 하지만 본 논문의 목적에 맞게 LFM 부펄스만을 고려하기로 한다. 개의 LFM 부펄스로 이루어진 수직지향 송신신호를 수식화하면 아래와 같다.
| $$\overset\frown{s_l}(t)=\left[p_l^n(t)\ast\sum_{n=0}^{N-1}\delta(t-nT_p)\right],\;0\leq t\leq T.$$ | (2) |
| $$p_l^n(t)=e^{j(2\pi f_nt+\pi\frac{B_p}{T_p}t^2)},\;0\leq t\leq T_p.$$ | (3) |
이때, 는 번째 LFM 부펄스이고, , 업 스윕(up sweep)일 때, , 다운 스윕(down sweep)일 때, 이다. 는 부펄스 간의 휴지기를 , 는 해당 대역폭의 최대 주파수를 의미한다.
일반적으로, 수직지향각의 범위는 부각 –5° ~ 30° 내외이다. Fig. 2와 같이 수직지향각이 클수록 해저면 반사(bottom bounce)는 가까운 거리 탐지가 가능하고 수직지향각을 여러 개 쓸수록 음영구역을 최소화 할 수 있다.

2.2 GSFM 펄스
GSFM 펄스는 SFM 펄스를 일반화한 펄스로 수식적으로 표현하면 아래와 같다.
| $$s_g(t)=e^{j\varphi(t)}e^{j2\pi f_ct},\;0\leq t\leq T.$$ | (4) |
는 중심주파수 이고, 위상 변조 함수()와 순시 주파수 함수()는 아래와 같이 표현된다.[5,7,8]
| $$\varphi(t)=\frac\beta{t^{(\rho-1)}}\sin\left(\frac{2\pi\alpha t^\rho}\rho\right).$$ | (5) |
| $$f(t)=\beta\alpha\left[\cos\left(\frac{2\pi\alpha t^\rho}\rho\right)-\left(\frac{\rho-1}\rho\right)\sin c\left(\frac{2\pi\alpha t^\rho}\rho\right)\right].$$ | (6) |
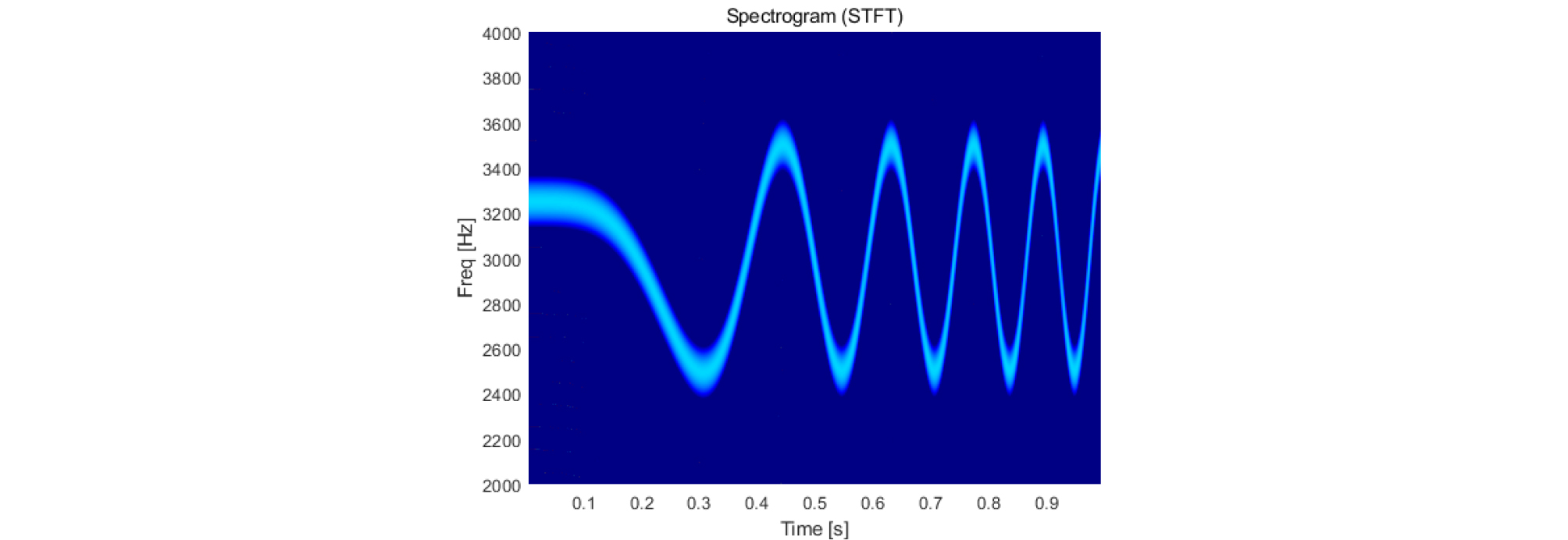
이때, 는 변조 지수이다. 는 GSFM 펄스의 순시 주파수 함수의 반복주기 수 를 결정하며, 로 주어진다. 는 비대칭성 조정 파라미터로 순시 주파수 함수의 전체적인 형태를 결정하며 그 값이 반드시 1보다 같거나 커야하고 값이 클수록 GSFM의 시간-주파수영역 비대칭성이 커진다. 이때 일 경우 SFM과 동일한 와 를 갖게 되고, 인 경우 GSFM의 순시 주파수 함수는 시간영역에서의 LFM 펄스와 유사한 형태가 된다.[5,7,8] Fig. 3은 GSFM의 스펙트로그램을 나타내었다. SFM의 스펙트로그램이 정현파(CW) 형태를 갖는 반면에 GSFM은 LFM형태의 스펙트로그램을 갖는 것을 확인할 수 있다. 이와같이 시간-주파수 영역에서의 주기성을 제거함으로써, SFM의 도플러축 grating lobe에 해당하는 탐지불가속도를 없앨 수 있다.
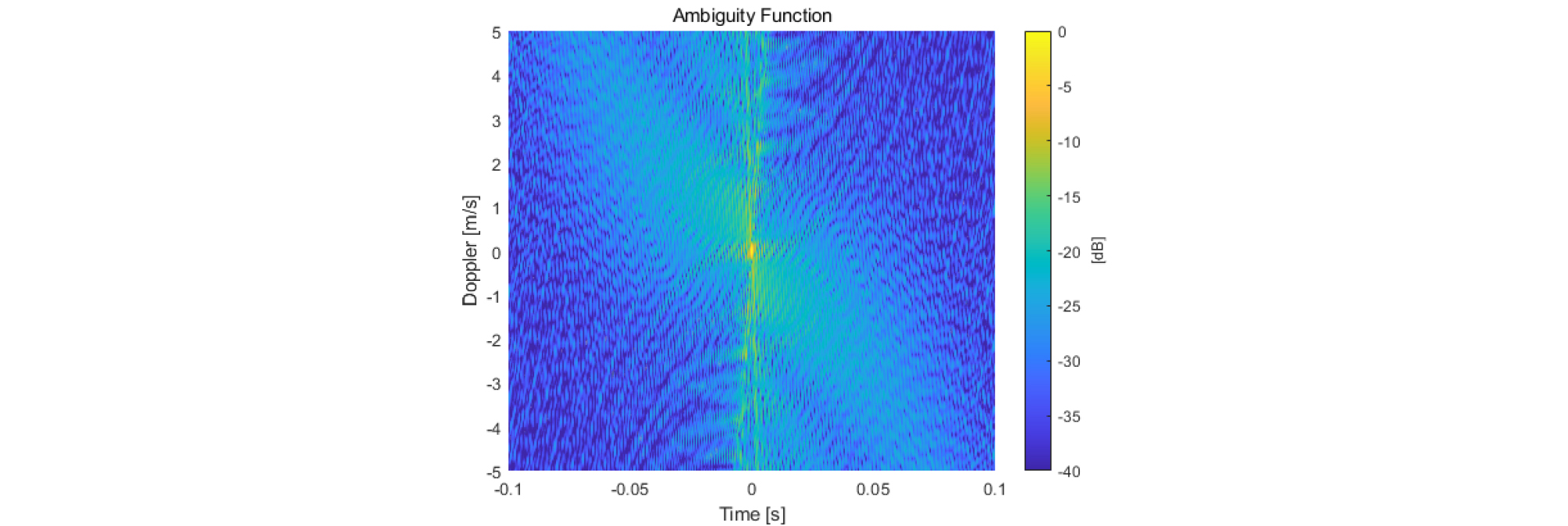
일반적으로 펄스의 성능을 분석 할 때는 모호성 함수를 활용한다.[3,5] 모호성 함수는 시간지연 와 도플러 스케일링 요소 에 관한 함수로 시간-도플러 2차원에서 특정 형태를 갖는다. 광대역 모호성 함수는 다음과 같이 표현된다.
| $$\chi(\tau,\eta)=\sqrt\eta\int_{-\infty}^\infty{s_g(t)}s_g^\ast(\eta(t+\tau))dt.$$ | (7) |
그리고 는 표적과의 상대속도, 는 수중 음속을 의미한다. Eq. (4)를 Eq. (7)에 대입하여 전개하면 GSFM에 관한 모호성 함수를 도출할 수 있고 Fig. 4와 같이 나타난다.[5] SFM과 달리 GSFM의 모호성 함수는 원점에 뚜렷한 주엽을 가짐과 동시에 거리, 도플러 평면에서 부엽의 크기가 작은 압정형태를 갖는다.
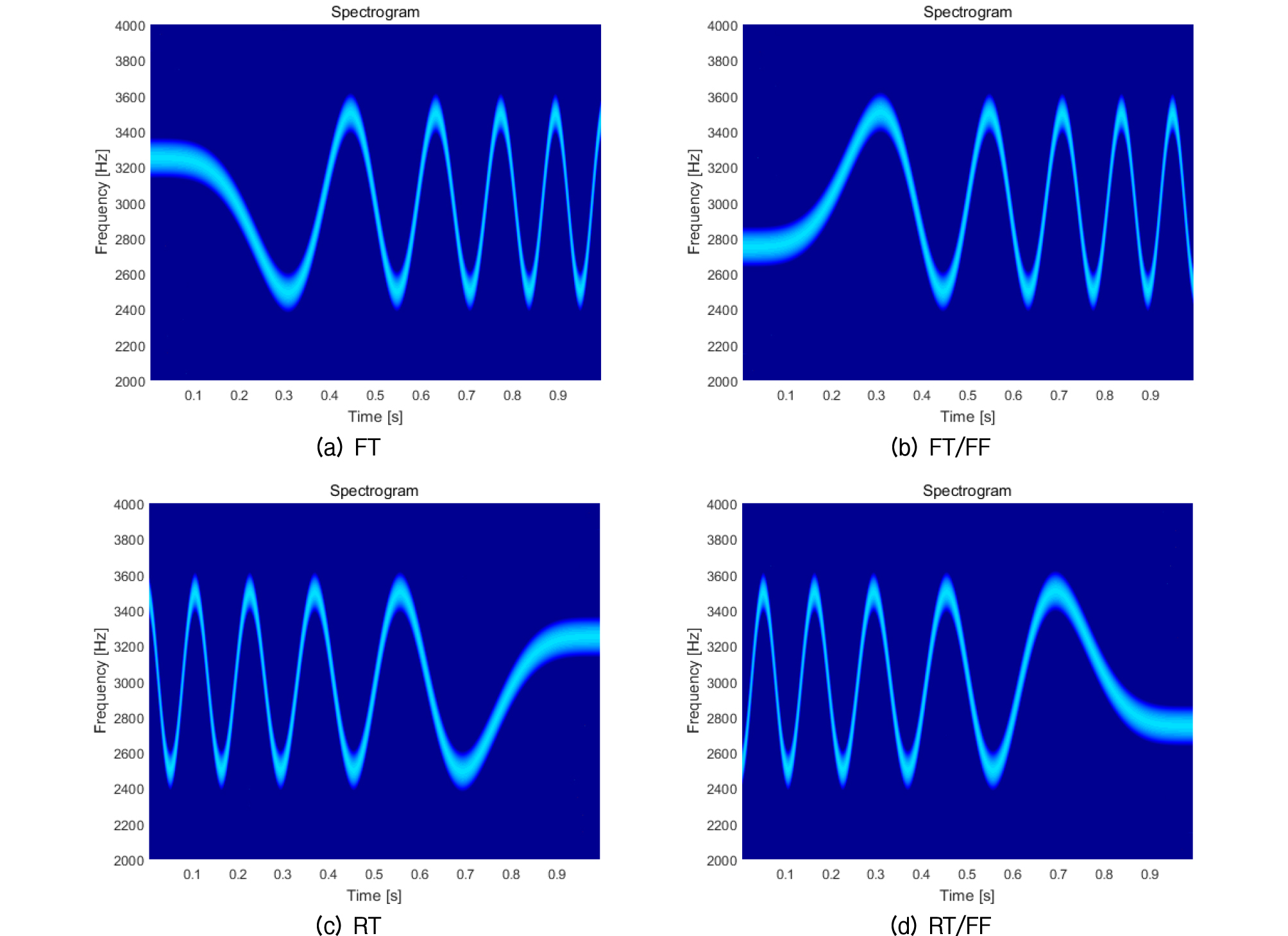
한편, 최근 Hague 와 Buck은 GSFM 펄스의 직교하는 특성을 이용한 GSFM 펄스열 신호를 제안하였다.[6,7] GSFM 펄스는 파라미터 , 와 순시 주파수 함수를 시간과 주파수 상에서 뒤집는 Time/Frequency Reflection(TRF)에 따라서 서로 직교하는 펄스를 만들 수 있다. Fig. 5와 같이 가 10, 가 2이고 중심주파수가 2 kHz, 대역폭이 1.2 kHz, 펄스길이 1 s인 GSFM 펄스를 Fig. 3과 같은 기본 Forward-Time(FT), FT를 주파수 반전한 FT/FF(Forward-Time/Flipped-Frequency), FT를 시간 반전한 Reverse-Time(RT), FT를 시간, 주파수 반전한 RT/FF의 네가지 TFR에 따른 스펙트로그램을 나타내었다. 네가지 부펄스 간에는 상호상관도가 매우 낮기 때문에(Fig. 8 참조) 대역을 동일하게 공유하면서도 서로 다른 부펄스를 송․수신할 수 있는 장점이 있고, 이러한 특성을 이용하여 펄스를 송․수신하는 소나뿐만 아니라 연속송수신 소나를 위한 송신신호 설계에도 활용할 수 있다.[6,7]References [6]과 [7]에서 Hague와 Buck은 Even-symmetric과 Even-Symmetric/FF 포함 총 여섯 가지 펄스를 제안하였지만 위 두 가지 펄스의 경우, FT, FT/FF, RT, RT/FF와 펄스의 절반이 같기 때문에 부펄스 간 간섭이 높아질 여지가 있으므로 본 논문에서는 제외하였다.
III. 제안한 방법
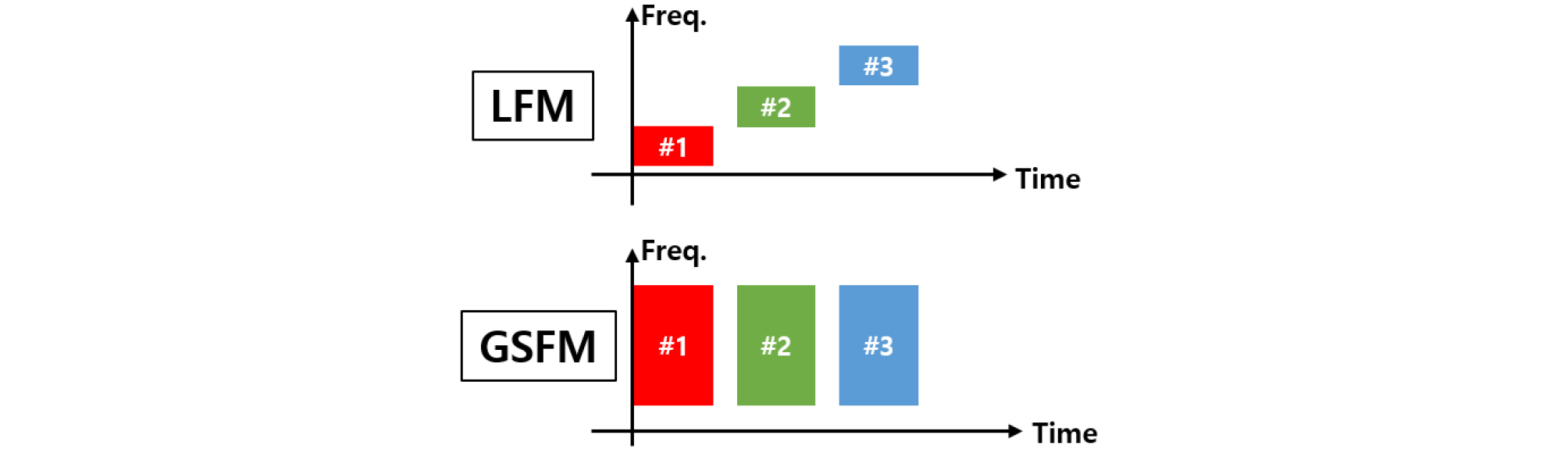
위 설명한 바와 같이 GSFM의 부펄스 간 직교성을 선체고정소나의 수직지향 능동탐지에 적용하면 Fig. 6과 같이 LFM의 경우와 같이 대역폭을 분할하지 않아도 되는 장점이 있으며 이로 인해 얻을 수 있는 시간-대역폭 곱이 배 증가하여 탐지성능 향상에 기여할 수 있을 것이라 판단된다.
개의 GSFM 부펄스로 이루어진 수직지향 송신신호를 수식화하면 아래와 같이 표현할 수 있다.
| $$\overset\frown{s_g}(t)=\left[p_g^n(t)\ast\sum_{n=0}^{N-1}\delta(t-nT_p)\right],\;0\leq t\leq T.$$ | (8) |
| $$p_g^n(t)=e^{j(2\pi f_ct+\varphi(t))},0\leq t\leq T_p.$$ | (9) |
이때, 는 번째 GSFM 부펄스이고, 는 Eq. (5)와 같고, 는 펄스의 중심주파수, 변조지수 이다. LFM 부펄스와 비교했을 때, GSFM의 부펄스의 대역폭은 로서 대역분할 하지 않으며 개의 부펄스의 대역폭과 중심주파수는 같고, 부펄스 종류는 Fig. 5의 네가지가 중복되지 않아야한다. > 4일 경우, Fig. 5의 네가지 GSFM 파형(FT, FT/FF, RT, RT/FF)만으로는 중복되는 부펄스가 발생하고, LFM이 중복된 대역폭을 사용할 경우와 마찬가지로 부펄스 간의 간섭이 발생한다. 따라서, 기존 네가지 GSFM 부펄스의 와 값을 변화시켜 추가적인 직교성을 확보해야한다. 즉, 와 가 다른 FT(또는 FT/FF, RT, RT/FF) 간에도 직교성이 있을 수 있다.[6,7] 펄스송수신소나에서는 > 4 경우는 드물지만, 연속송수신소나에서는 빈번하며 이러한 경우 최적의 펄스열을 찾기 위해 유전 알고리즘과 같은 최적화 알고리즘을 활용하기도 한다.[9]
IV. 실험 및 결과
4.1 모의실험 환경
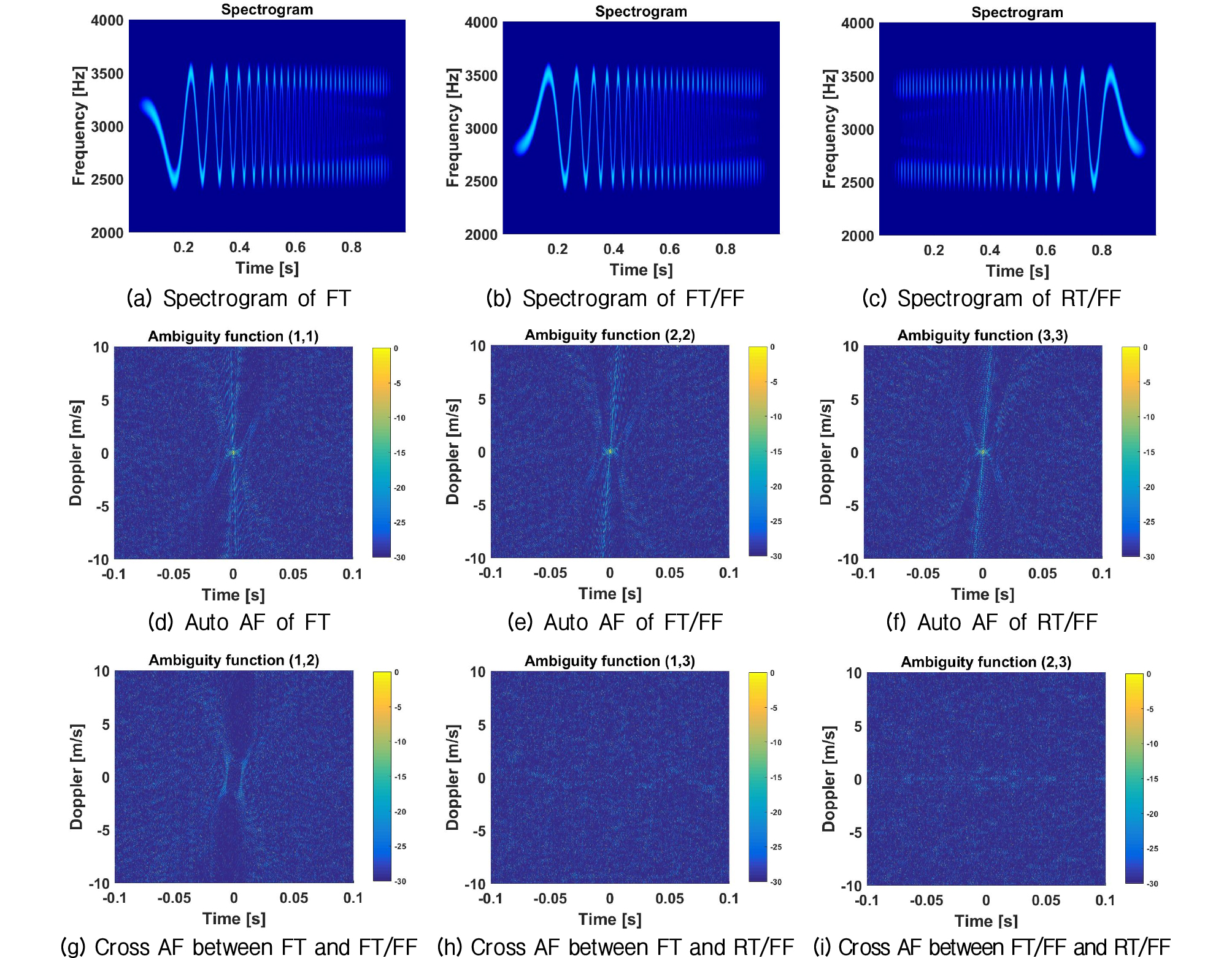
제안한 방안을 검증하기 위해 선체고정소나 수직지향 모의실험을 수행하였으며 전체적인 실험환경은 Fig. 7과 같다. 음속이 심도가 깊어질수록 증가하도록 설정하였다. 실제 해상환경을 모사하기 위해 음선 추적기법[10]을 활용하여 잔향신호를 합성하였으며, 그 결과는 Fig. 8과 같다. 합성된 신호의 표본화 주파수는 8192 Hz, 수심은 75 m, 송수신기의 깊이는 5 m로 신호대 잡음비는 -3.96 dB로 설정하였다. 2500 Hz에서 3500 Hz 사이의 주파수 대역을 갖는 LFM과 GSFM 펄스 두 종류를 사용하였으며, 3개의 수직지향각을 각각 10°, 4°, -2°로 설정하였다. LFM과 GSFM과의 성능차이를 효과적으로 비교하기 위해 동일한 표적 환경(수직지향#1에서만 탐지)에서 LFM(시나리오 1)과 GSFM(시나리오 2) 수직지향 탐지 성능을 비교 하고, 추가적으로 표적이 모든 수직지향각에서 탐지될 때의 GSFM(시나리오 3) 탐지성능을 확인할 수 있는 시나리오 세가지를 설정하였다. 해당 시나리오의 표적 정보(거리, 심도, 도플러), 펄스 종류 및 파라미터(중심주파수, 대역폭, 펄스길이)는 Table 1에 구체적으로 기술하였다. 이때 LFM은 전체 1 kHz 대역폭을 3개의 부펄스가 1/3씩 대역분할하였고, GSFM 펄스는 부펄스의 중심주파수, 대역폭, 펄스길이는 같게 하고, 직교성을 확보하기 위해서 TFR만을 변경하였다. GSFM의 부펄스 간 직교성을 분석하기 위해 Fig. 8과 같이 스펙트로그램과 모호성 함수를 분석하였다. 해당 모의실험의 GSFM의 부펄스로는 FT, FT/FF, RT/FF 세가지를 사용하였고, Fig. 9(a), (b), (c)의 스펙트로그램은 각각 Fig. 5(a), (b), (d)와 같은 형태를 보이는 것을 확인할 수 있다. Fig. 9(d), (e), (f)는 FT, FT/FF, RT/FF 각각의 자기모호성 함수를 도시한 것으로 각각 시간-도플러 평면에서 높은 해상도를 갖는 압정형태라는 것을 확인할 수 있다. 또한, Fig. 9(g), (h), (i)는 FT, FT/FF, RT/FF 간의 상호모호성 함수를 도시한 것으로써, 부펄스 간 상호상관도가 매우 낮은 것을 확인할 수 있다.

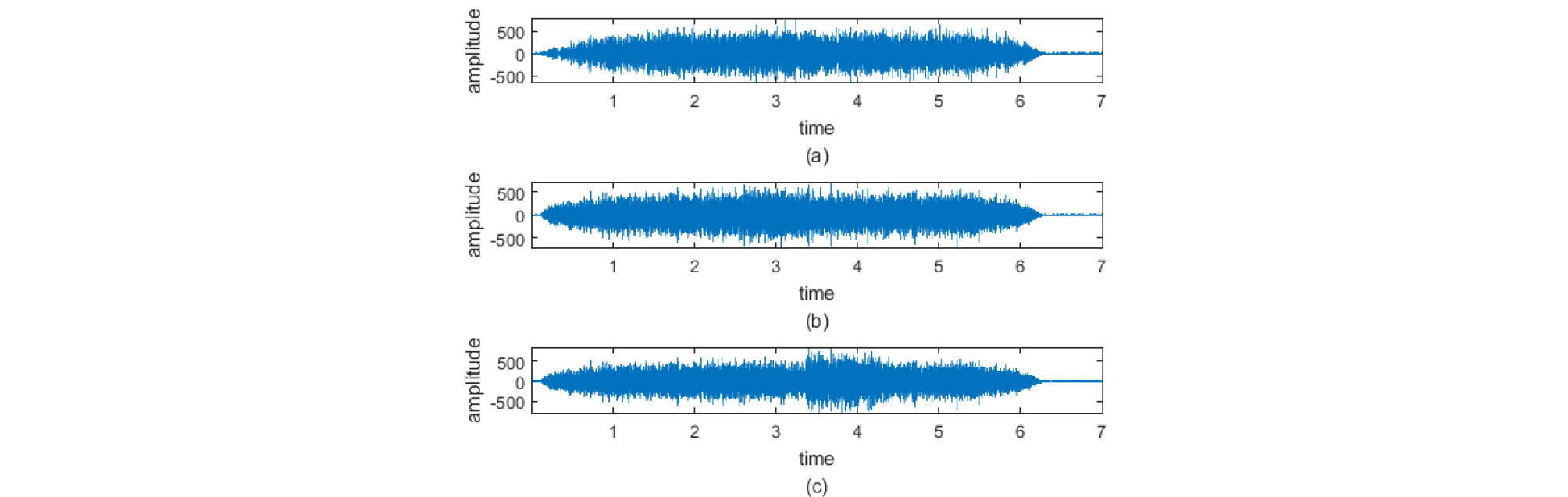
Table 1.
parameters for simulation environments.
4.2 모의실험 결과
Fig. 10에 각 시나리오에 대한 음선 추적법과 정합필터 결과를 나타내었다. Fig. 10에서 음선 추적 기법 결과를 나타내는 (a), (b), (c)를 제외한 모든 정합필터 결과는 표적과 동일한 도플러를 가지는 레플리카를 이용하여 처리한 결과이다.
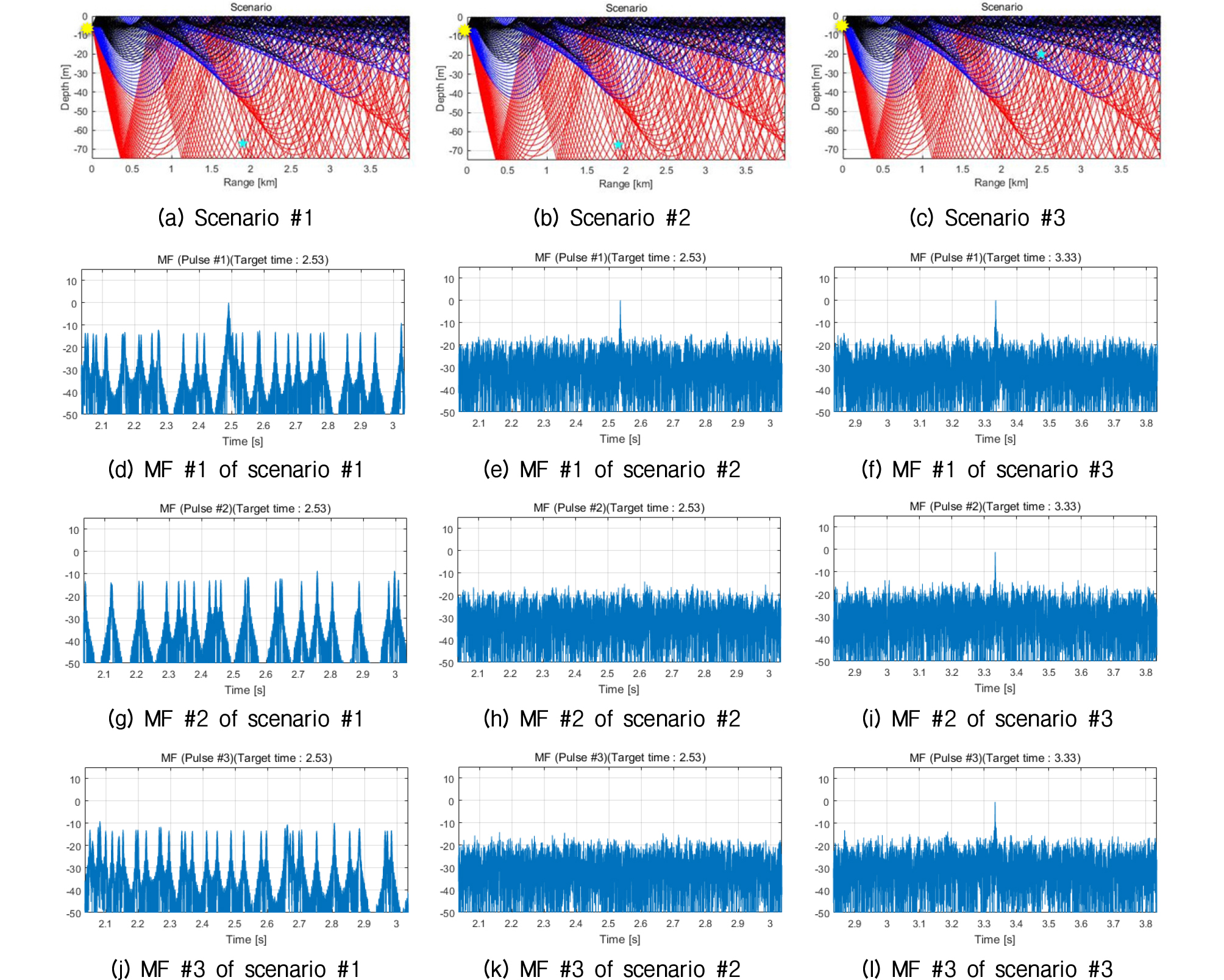
시나리오 1은 기존 방법인 LFM을 이용한 수직지향 능동탐지를 모사하였다. Fig. 10(a)에서 노란색 별표시는 음원, 하늘색 별표시는 표적을 나타낸다. 표적이 있는 심도 67 m에는 수직지향# 1에 해당하는 음선만 지나가므로 Fig. 10(d), (g), (j) 중 (d) 에서만 표적이 탐지된다. 표적거리에 해당하는 2.53 s에 정합필터 첨두값이 존재하며, 이득(첨두값과 부엽의 차)이 15.81 dB였다.
시나리오 2는 Fig. 10(b) 와 같이 시나리오 1과 동일한 표적일 때, 제안한 GSFM을 이용한 수직지향의 정합필터 결과를 분석하기 위한 실험이다. LFM과 같이 수직지향# 1에 해당하는 음선만 지나가므로 Fig. 10(e), (h), (k) 중 (e)에서만 표적이 탐지되었고, 표적거리에 해당하는 2.53 s에 정합필터 첨두값이 존재하며, 이득은 20.98 dB로 LFM 대비 5.17 dB 가량 높았다. 이는 LFM대비 부펄스의 대역폭이 3배 증가했기 때문으로 보인다.
시나리오 3은 Fig. 10(c)와 같이 표적이 세가지 수직지향 음선이 모두 지나가는 심도 20 m에 위치했을 경우의 탐지 실험이다. Fig. 10(f), (i), (l) 의 모든 경우에 표적이 있는 3.33 s 지점에서 정합필터 첨두치가 존재하며, 정합필터 이득이 각각 18.41 dB, 19.37 dB, 19.65 dB였다. 표적의 위치가 다르므로 시나리오 1과 직접적인 비교는 무리지만 참고하여 결과를 분석해보면, LFM 대비 탐지 성능을 향상시킬 수 있음을 확인하였다.
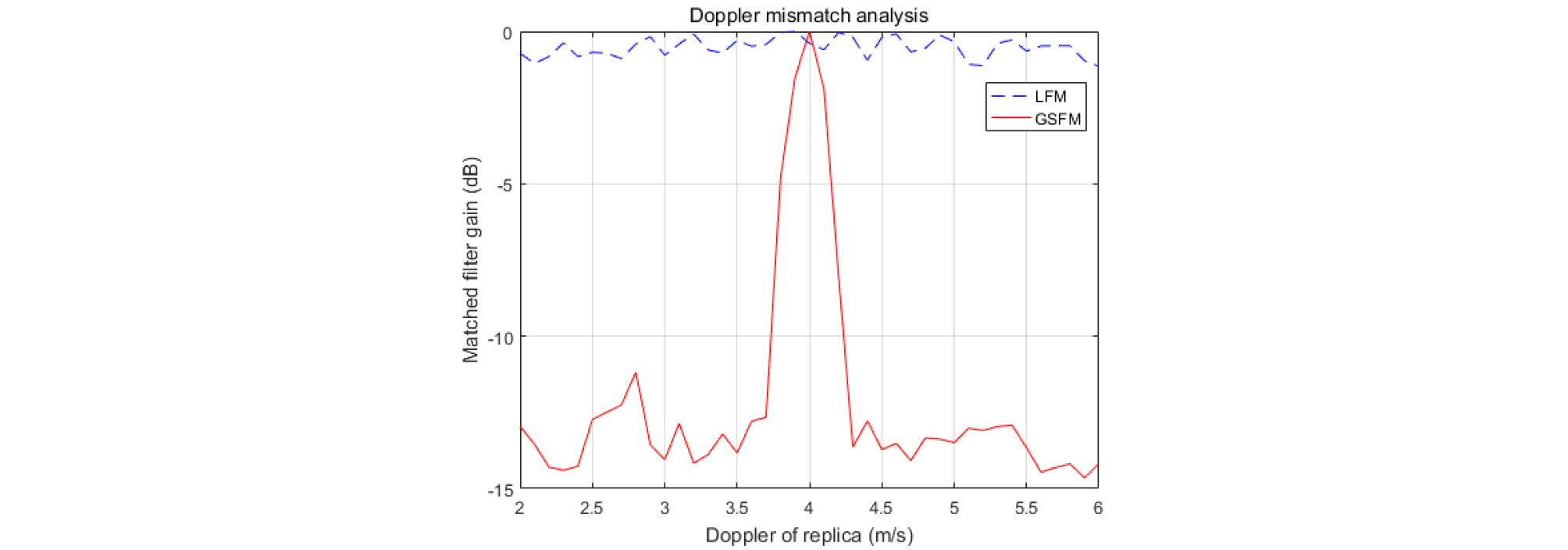
하지만, Fig. 11과 같이 실제 환경에서는 표적 도플러를 정확히 알 수 없기 때문에 다양한 도플러가 반영된 여러 개의 레플리카를 생성하여 정합필터를 수행한다. LFM의 경우 정합필터의 레플리카와 표적 도플러(4 m/s) 간의 오차에 의한 도플러 부정합이 발생하더라도 정합필터 성능에 큰 영향을 받지 않는 반면에 GSFM은 압정형태의 모호성 함수 때문에 도플러 부정합이 발생하면 정합필터 이득이 급격히 떨어진다. 따라서, GSFM의 경우 많은 수 레플리카를 매우 촘촘히 생성해야할 필요성이 있다.