

I. 서 론
예인형 선배열 센서는 소나시스템에서 수신기로써 사용된다. 일반적으로 소나시스템의 탐지성능, 즉 음향신호의 신호대잡음비를 높이기 위하여 선배열 센서로 입사하는 음향신호의 입사 방위에 대한 공간 필터로 작용하는 신호처리 기법인 빔형성이 사용된다.[1] 빔형성을 위해 각 채널 별 음향센서 신호는 음원의 입사 방위에 따른 시간 지연을 적용하여 조합된다. 이때 시간 지연은 음향센서의 구조적 형상에 기인하여 계산된다. 선배열 센서에는 수중 음향센서 모듈이 일정한 간격으로 배치되어있고, 그 길이는 음향센서 채널 수 및 운용 주파수에 따라 길게는 수백 미터에 이를 만큼 길다. 긴 예인형 선배열 센서의 경우 운용 간 예인선의 속도와 조류 등의 영향으로 형상이 일정하지 않고 변하게 되며, 이를 정확히 추정하지 않으면 센서 형상에 따른 입사 방위 별 지연시간 적용이 실제와 일치하지 않음에 따라 빔형성 성능의 저하를 야기한다.[2] 선배열 센서의 형상 추정 기법은 크게 세 가지로 분류할 수 있다. 첫 번째는 예인선의 침로 및 속력, 케이블의 텐션, 물의 밀도 등을 이용한 원통형 케이블 운동방정식으로 추정하는 방법,[3] 두 번째는 배열로 받아들인 음향센서 신호를 분석하여 추정하는 방법,[4] 세 번째는 방위센서나 수심센서와 같은 보조센서를 이용하는 방법이다.[5] 본 논문에서는 그 중 보조센서(방위센서)를 이용한 형상 추정 기법에 대해 다룬다.
방위센서를 이용하는 방법에는 최소자승법을 이용한 다항 근사화 기법이 연구되었다.[5]일반적으로 최소자승법을 이용한 다항 근사화의 경우 그 추정성능이 입력신호에 매우 의존적이다.[2] 따라서 입력되는 방위센서 신호에 일부 잡음이 포함되었을 때 기대하지 않은 결과가 나올 수 있다. 실제로 방위센서를 운용하는 동안 일반적인 측정 잡음뿐만 아니라 측정데이터분산의 3배 이상 크게 증가하는 임펄스성 잡음이 발생하는 경우가 있다.[2] 이러한 임펄스성 잡음은 예인선이 선회 후 배열의 자세가 안정화될 때까지 수분 간 발생하기도 한다.[2] 이 문제를 해결하지 않으면 배열 형상 추정이 정확하게 되지 않아 빔형성 성능이 떨어질 수밖에 없다. 특히 잡음의 영향을 줄이기 위해 입력되는 방위센서 신호 샘플들을 평균하는 등의 방법을 적용하는 경우에도 임펄스성 잡음은 측정 데이터 값에 대한 편향을 일으키는 등 영향을 주게 된다.
본 논문에서는 이를 보완하기 위해 입력되는 방위센서 신호를 이전 추정치에 의해 계산된 가중치에 따라 기여도를 다르게 하는 가중 다항 근사화 기반 배열 형상 추정 기법을 제안하였다. 이를 검증하기 위해 배열 형상의 예제 모델 시뮬레이션을 통하여 잡음 상황에서의 형상 추정 결과 및 오차를 구하였으며, 기존의 기법과 비교하여 성능이 개선되었음을 확인하였다.
본 논문의 구성은 다음과 같다. II장에서는 방위센서를 이용한 선배열 형상 추정 기법에 대해 소개하고, III장에서는 제안된 기법에 대해 설명한다. IV장에서 시뮬레이션을 통한 성능분석 및 검증을 논한 뒤, V장에서 결론을 맺는다.
II. 선배열 형상 추정 기법
비선형 선배열 센서를 다음과 같이 좌표계의 원점을 통과하는 차 다항식으로 표현할 수 있다고 가정한다.[5]
| $$y(x)=a_1x+a_2x^2+\;\cdots\;+a_Nx^N.$$ | (1) |
선배열 센서를 Eq. (1)과 같이 표현하였으므로 배열 상의 임의 위치에서 방위센서 출력은 해당 위치에서 다항식의 기울기가 된다. 다항식 Eq. (1)의 기울기는 아래와 같이 에 대한 미분으로 표현된다.
| $$y'(x)=a_1+2a_2x+\;\cdots\;+Na_Nx^{N-1}.$$ | (2) |
따라서 개의 방위센서로부터 측정된 방위를 이라고 할 때, 배열 형상 추정은 주어진 축 위치 에 대해 Eq. (3)을 만족하는 다항식 계수 를 결정하는 문제가 된다.
최소자승법을 이용하여 Eq. (3)을 풀어내면 다음과 같다.
| $$A=(H^TH)^{-1}H^T\vec h.$$ | (4) |
이 해를 풀기 위해서는 앞서 언급한 것처럼 방위센서의 축 위치이 주어져야 한다. 하지만 우리는 방위센서의 위치를 모르기 때문에 이를 일직선 상에 등간격 로 배치되어 있다고 가정한다. 이 경우 비선형의 정도가 작을 때는 합리적이지만 비선형의 정도가 클 경우 실제곡선과 추정곡선사이에 차이가 커지게 된다. 이를 개선하기 위해 반복 다항 근사화 기법이 고안되었다.[5]
반복 다항 근사화 기법은 첫 번째 번 방위센서의 추정위치를 로 두고 배열 형상을 구한 뒤 추정곡선을 따라 길이 인 번째 방위센서 위치 을 구하여 다음 계산에 사용하는 기법이다. 이를 반복적으로 수행하여 목표하는 방위센서의 추정위치 변화율()이 임계치() 이하로 수렴할 때 위치추정을 종료한다.
III. 제안기법
I장에서 언급한 내용과 같이 방위센서에 포함된 잡음으로 인해 최소자승법을 이용한 배열 형상 추정 기법의 성능이 저하 될 수 있다.
아래 식과 같이 번째 방위센서의 참값을 , 해당 센서의 잡음성분을 이라고 할 때,
| $$\begin{array}{l}\vec h=\vec t+\vec e\\\vec t=\begin{bmatrix}t_1\\t_2\\\cdots\\t_M\end{bmatrix}\;\;\;\;\;\;\;\;\;\vec e=\begin{bmatrix}e_1\\e_2\\\cdots\\e_M\end{bmatrix}.\end{array}$$ | (5) |
Eq. (5)를 Eq. (4)에 대입하여 풀어 쓴 식은 Eq. (6)과 같다. Eq. (4)를 이용하여 다항식의 계수를 풀어보면 Eq. (7)과 같이 잡음에 의한 추정 계수 가 생성된다. 여기서 는 방위센서 참값에 의한 추정 계수를 의미한다.
| $$A=(H^TH)^{-1}H^T\vec t+(H^TH)^{-1}H^T\vec e.$$ | (6) |
| $$A=A_t+A_e.$$ | (7) |
이러한 추정 계수 오차 성분으로 인해 잡음의 크기에 비례하는 형상 추정 오차가 발생한다. 특히 임펄스성 잡음과 같이 잡음의 크기가 순간적으로 매우 클 경우 형상 추정에 미치는 영향 역시 크다.
이를 해결하기 위해 본 논문에서는 Fig. 1과 같이 입력되는 방위센서 측정값과 이전 추정 다항식의 방위센서 추정값의 차이를 이용한 가중치를 다음 방위센서의 추정값에 적용하는 가중 다항 근사화 기반 배열 형상 추정 기법을 제안하였다.
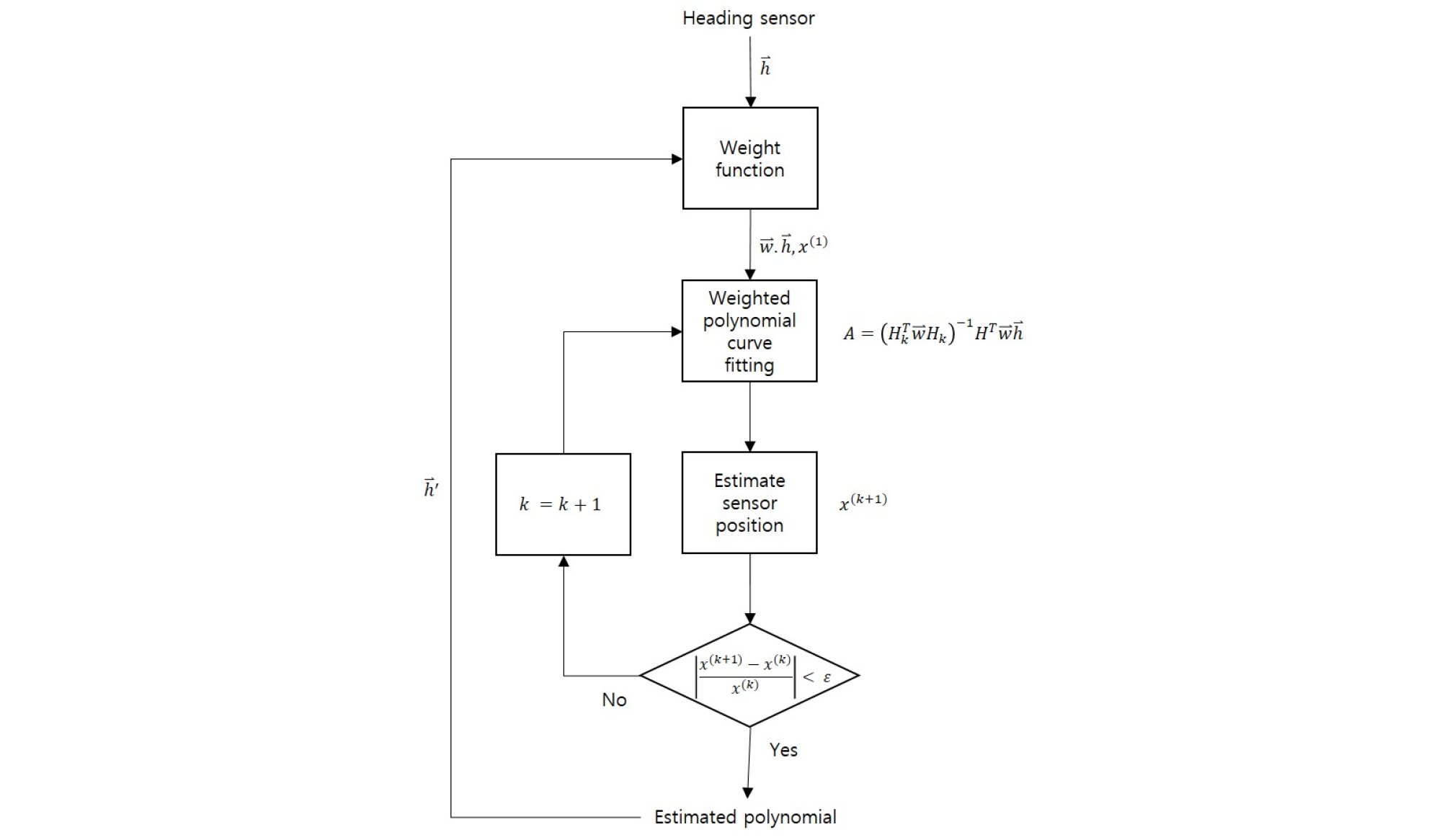
선배열 센서의 움직임은 연속적이므로 임의의 짧은 시간구간에서 선배열 센서의 모양이 일정하게 유지되고, 측정 잡음은 정규분포를 따른다고 가정한다. 입력되는 방위센서 측정값()과 이전 추정 다항식의 방위센서 추정값()의 차이, 임펄스성 잡음이 없을 때 측정한 방위센서 측정값의 표준편차()를 Eq. (8)과 같은 가우시안 함수의 입력으로 전달하면, 정규분포를 벗어나는 불연속적인 임펄스성 잡음의 가중치는 0에 가까워지고, 연속적인 방위센서 신호의 가중치는 1에 가까워진다. 이러한 원리를 이용한 가중치를 생성한다.
| $$w(m)=e^{-\frac12(\frac{h_m-h_m^{'\;}}\sigma)^2}.$$ | (8) |
: 번째 방위센서 측정값
: 추정 다항식의 번째 방위센서 추정값
: 방위센서 측정값의 표준편차
Eq. (4)에서 비선형 배열센서를 근사화한 다항식 계수 를 구하기 위해 최소자승법을 이용하였다. 여기에 Eq. (8)의 가중치 를 원소로 가지는 대각행렬를 적용하면 아래와 같이 가중최소자승법으로 표현가능하다.
| $$\begin{array}{l}A=(H^TWH)^{-1}H^TW\vec h\\W=\begin{bmatrix}w(0)&0&\cdots&0\\0&w(1)&\cdots&0\\\cdots&\cdots&\cdots&\cdots\\0&0&\cdots&w(M)\end{bmatrix}.\end{array}$$ | (9) |
위와 같이 가중최소자승법을 이용하면 입력되는 방위센서 신호에 따라 계산된 가중치에 따라 센서 별로 형상 추정의 기여도가 조절되어 불연속적인 임펄스성 잡음에 의한 오차를 줄일 수 있게 된다.
IV. 시뮬레이션
4.1 시뮬레이션 모델
본 논문에서 제시한 가중 다항 근사화 기반 배열형상 추정 기법의 타당성을 검증하기 위해 Table 1과 같이 음향모듈 길이가 350 m인 예인 선배열 시스템을 예제 모델로 선정하였다. 8개의 헤딩센서가 등간격 50 m로 배치되어있으며, 선배열센서의 비선형 정도는 비선형성으로 표현하였다. 여기서 비선형성은 Fig. 2와 같이 곡선의 y축 최대 변위를 x축 최대 변위로 나눈 값을 의미하며 아래 식과 같이 나타낸다.[6]
| $$\delta=\frac{\triangle y_{max}}{\triangle x_{max}}\times100.$$ | (10) |
Table 1.
Parameter setup for simulation.

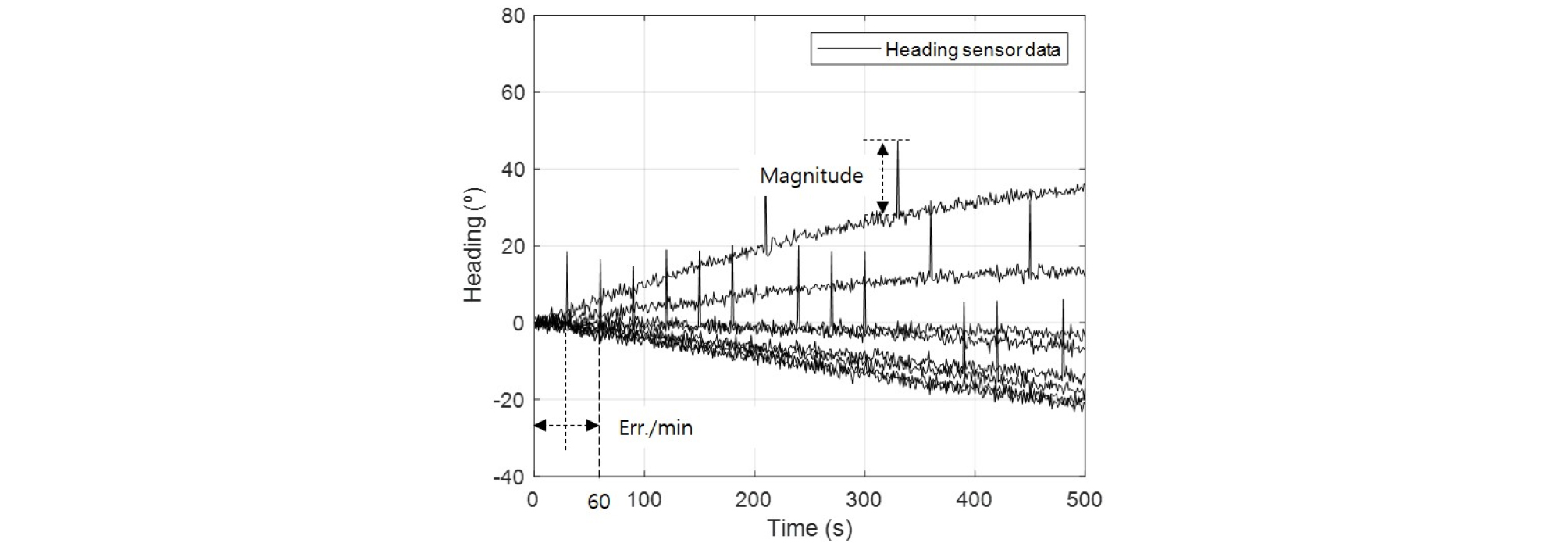
실제 운동에서 유도되는 배열형상의 추정에 4차 이상의 다항식 적용이 필요하기 때문에 다항 근사화 차수는 4차로 설정하였다.[5]입력되는 방위센서 신호 예시는 Fig. 3 과 같으며, 여기에 정의한 임펄스 발생빈도(분당 임펄스성 잡음 발생 횟수)와 임펄스의 크기에 따라 배열 형상 추정 성능을 분석하였다.
4.2 임펄스성 잡음의 영향
임펄스성 잡음이 배열 형상 추정에 미치는 영향을 알아보기에 앞서 임펄스성 잡음이 없을 때 제안 기법과 기존 기법[5]의 배열 형상 추정 성능을 비교해 보았다.
비선형성을 0 %부터 25 %까지 5 %씩 변경해가며 500회 씩 반복 시험하여 Fig. 4에 평균 추정위치를 나타내었고, Table 2에 추정 위치 오차를 Root Mean Square Error(RMSE)로 비교하였다. 해당 결과로 볼 때 임펄스잡음이 없는 경우에는 두 기법의 성능은 크게 차이가 없거나 제안 기법의 형상 추정 오차가 조금 더 작다는 것을 알 수 있다. Table 3에는 두 기법의 평균 연산시간을 측정하여 비교하였다. 측정결과 두 기법의 연산시간에는 큰 차이가 없으며, 그 차이는 반복 다항 근사화 기법의 특성상 비선형성이 증가할수록 반복 횟수가 늘어나 증가하는 연산량에 비해 매우 작기 때문에 큰 의미가 없음을 확인하였다.
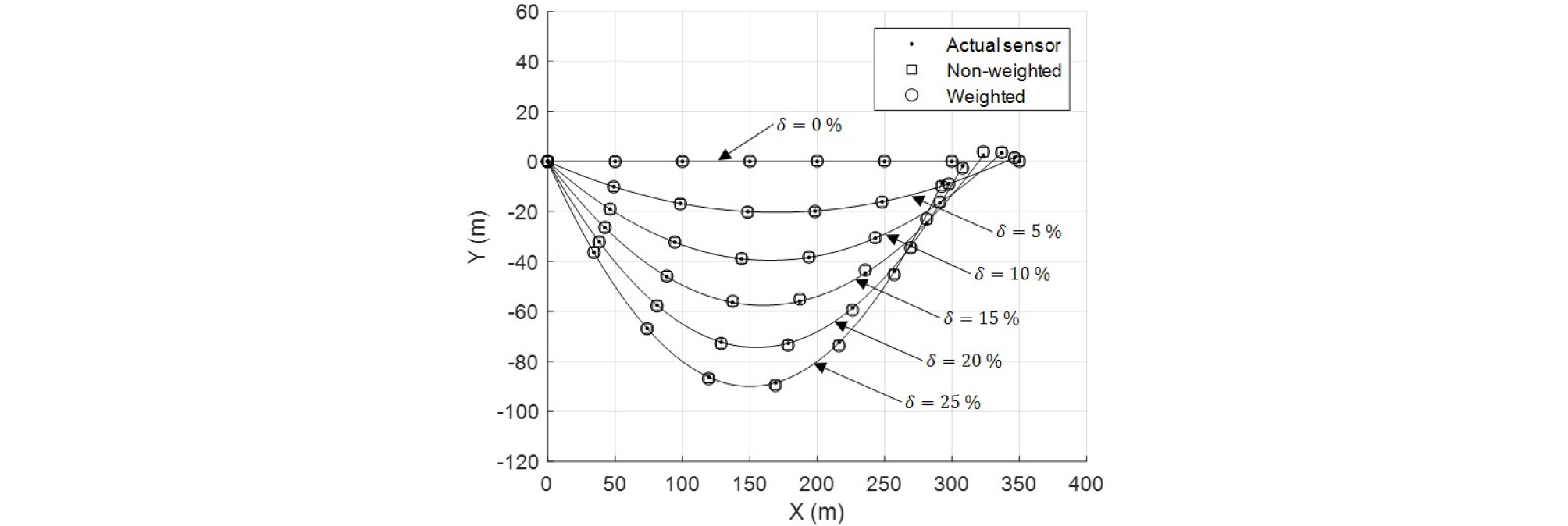
Table 2.
The comparison of the heading sensor position errors between the weighted and non- weighted methods.
| Non-linearity [%] | RMSE [m] | |
| Weighted | Non-weighted | |
| 0 | 1.38 | 1.50 |
| 5 | 1.36 | 1.50 |
| 10 | 1.39 | 1.54 |
| 15 | 1.43 | 1.58 |
| 20 | 1.48 | 1.64 |
| 25 | 1.69 | 1.80 |
Table 3.
The comparison of the calculation time between the weighted and non-weighted methods.
| Non-linearity [%] | Calculation time [msec] | |
| Weighted | Non-weighted | |
| 0 | 17.32 | 18.36 |
| 5 | 34.25 | 34.21 |
| 10 | 48.18 | 47.98 |
| 15 | 64.11 | 64.38 |
| 20 | 80.59 | 80.47 |
| 25 | 90.03 | 89.15 |
다음으로 비선형성을 0 %부터 20 %까지 10 %씩 변경해가며 2차 및 3차 곡선형태의 배열에 대해 임펄스성 잡음의 유무에 따라 제안기법과 기존기법의 배열 형상 추정 결과를 비교해 보았다. 이때 임펄스의 발생 빈도는 10 Err./min(분당 임펄스성 잡음 발생 횟수) , 임펄스의 크기는 20°로 설정하였다. Fig. 5(a), (c), (e), (g), (i)는 임펄스성 잡음이 발생하지 않았을 때 두 기법의 배열 형상 추정 결과이고, Fig. 5(b), (d), (f), (h), (j)는 임펄스성 잡음이 발생했을 때 두 기법의 배열 형상 추정 결과이다. 그림과 같이 임펄스성 잡음에 의해 오차가 발생하는 기존기법에 비해 제안기법은 비교적 정확하게 배열형상을 추정하였다. 이를 500회 씩 반복시험하여 Table 4과 같이 RMSE로 비교해보면 제안기법의 형상 추정 오차가 기존기법보다 작다는 것을 명확히 알 수 있다.
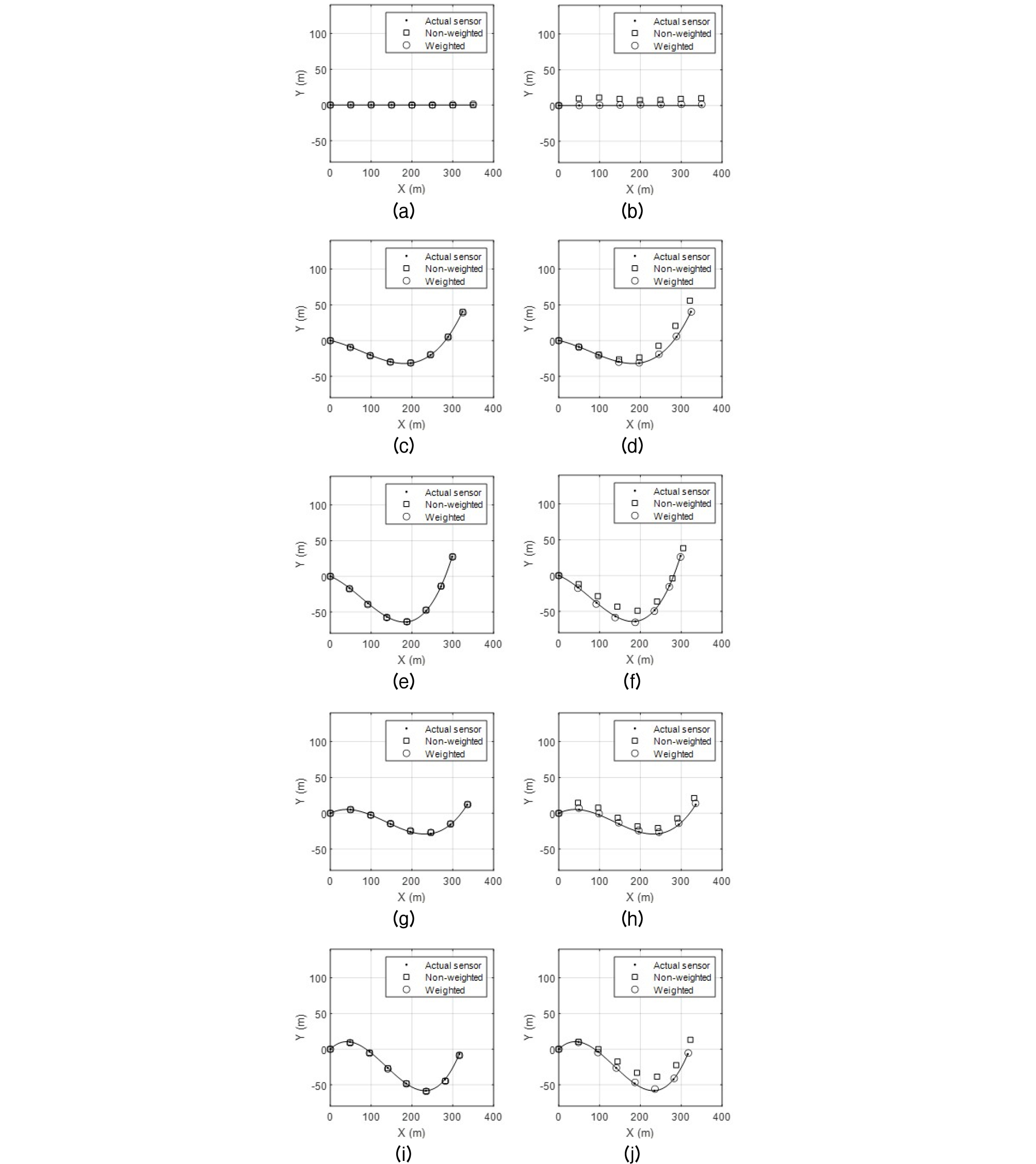
Fig. 5.
The comparison of the array shape estimation between the weighted and non-weighted method. (a) =0 %, (b) =0 % with impulse noise, (c) =10 % (2nd order), (d) =10 % (2nd order) with impulse noise, (e) =20 % (2nd order), and (f) =20 % (2nd order) with impulse noise, (g) =10 % (3rd order), (h) =10 % (3rd order) with impulse noise, (i) =20 % (3rd order) and (j) =20 % (3rd order) with impulse noise.
Table 4.
The comparison of the heading sensor position errors between the weighted and non- weighted methods.
| Degree | Non-linearity [%] | RMSE [m] | |
| Weighted | Non-weighted | ||
| 2nd order | 0 | 1.28 | 4.53 |
| 10 | 1.30 | 4.55 | |
| 20 | 1.62 | 4.65 | |
| 3rd order | 10 | 1.36 | 4.54 |
| 20 | 2.81 | 4.67 | |
마지막으로 배열 형상 추정 결과에 따른 하이드로폰 위치추정 및 빔형성 결과를 비교해 보았다. Table 1과 같이 방위센서 및 하이드로폰이 배치되어있고, 비선형성 10 %인 상황을 모사하였다. 표적의 방위는 90°, 거리는 10 km, 분석주파수는 100 Hz이며 빔형성에 사용된 빔의 개수는 300개이다. Fig. 6과 같이 기존 기법의 결과에서는 임펄스성 잡음에 의해 하이드로폰 위치추정 결과가 왜곡되었고, 그에 따라 Fig. 7과 같이 빔형성 출력의 탐지방위 또한 오차가 발생하였다. 그에 반하여 제안기법의 결과에서는 하이드로폰의 위치 및 빔형성 출력의 탐지방위가 실제 센서의 위치를 사용했을 때와 비교적 일치하였다. 이를 명확히 확인하기 위해 위 실험에서 비선형성을 0 %부터 20 %까지 10 %씩 변경해가며 500회 씩 반복시험하였고, Table 5와 같이 RMSE로 비교해보면 제안기법의 표적 방위 탐지 오차가 기존기법보다 작다는 것을 알 수 있다.
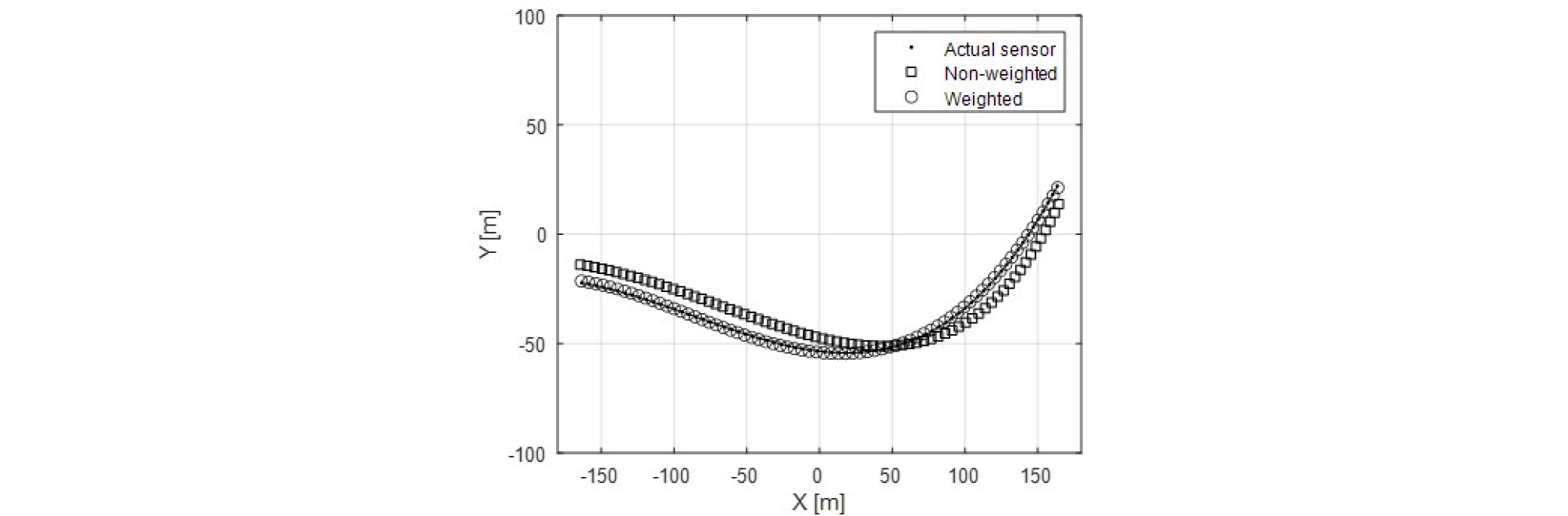
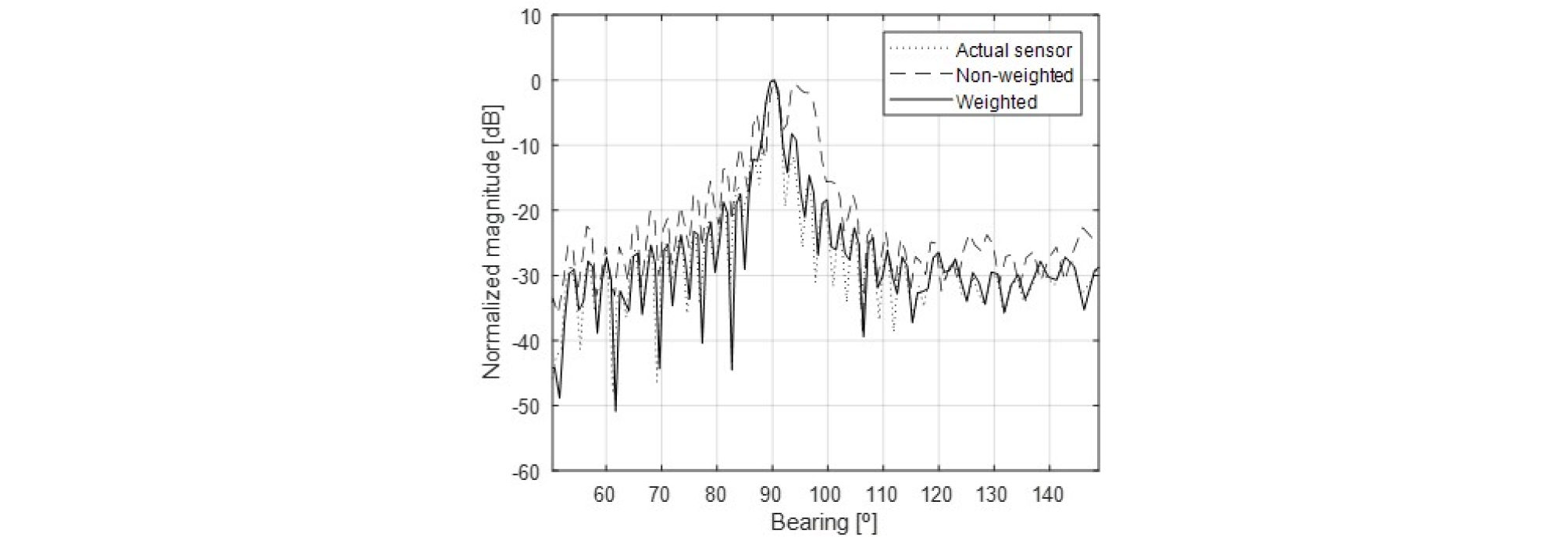
Table 5.
The comparison of the detected target bearing errors between the weighted and non- weighted methods.
| Degree | Non-linearity [%] | RMSE [°] | |
| Weighted | Non-weighted | ||
| 2nd order | 0 | 0.26 | 1.43 |
| 10 | 0.37 | 1.56 | |
| 20 | 0.41 | 1.68 | |
| 3rd order | 10 | 0.47 | 1.47 |
| 20 | 0.49 | 1.49 | |
4.3 형상 추정 성능분석
앞서 제안기법은 기존기법에 비해 임펄스성 잡음에 강인한 배열 형상 추정 결과를 보여주었다. 이에 다양한 임펄스성 잡음을 가정하여 기존기법과 제안기법의 형상 추정 성능을 비교해 보려고 한다.
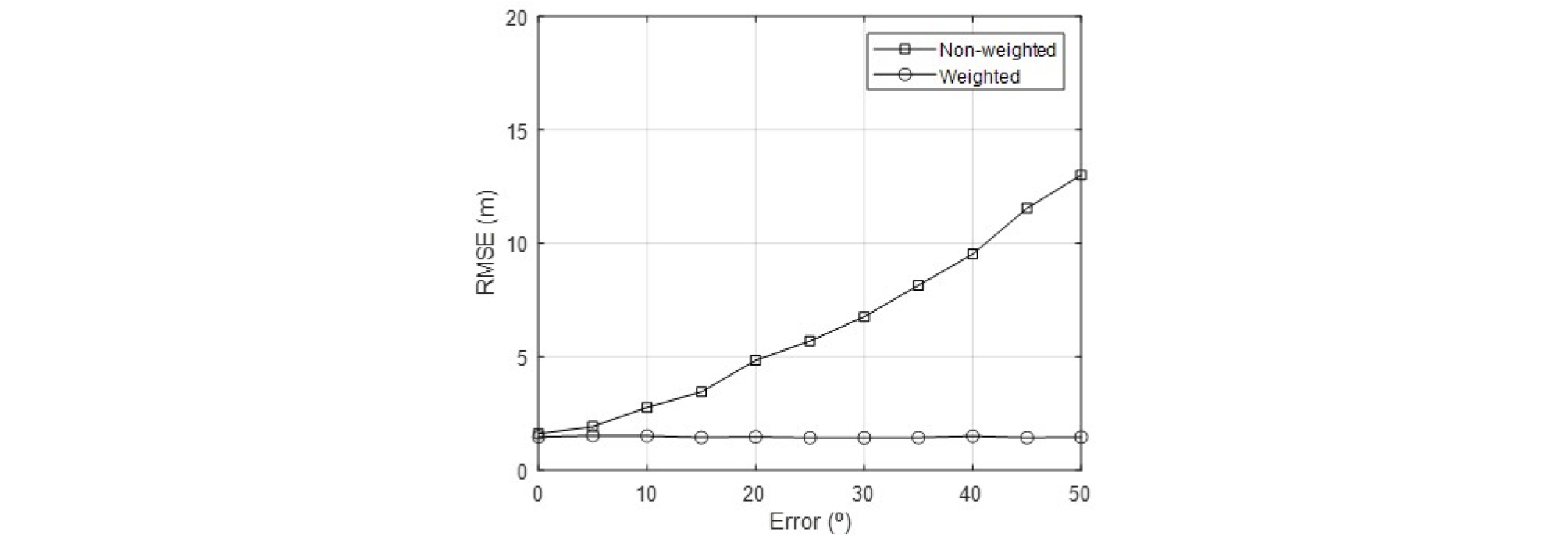
먼저 임펄스성 잡음의 크기에 따른 추정 오차 분석 결과이다. 시나리오는 Fig. 8와 같이 비선형성이 0 %부터 20 %로 시간에 따라 연속적으로 변하는 상황을 모사했으며, 임펄스 발생 빈도는 10 Err./min으로 고정시킨 상태에서 임펄스의 크기를 0° ~ 50°로 5° 씩 변화시켜가며 500 s 간 배열 형상 추정을 수행하였고 RMSE로 추정성능을 비교하였다. 그 결과는 Fig. 9와 같이 기존 기법은 임펄스성 잡음의 크기가 커질수록 추정오차가 커지지만 제안 기법은 거의 일정한 추정성능을 유지하고 있다.
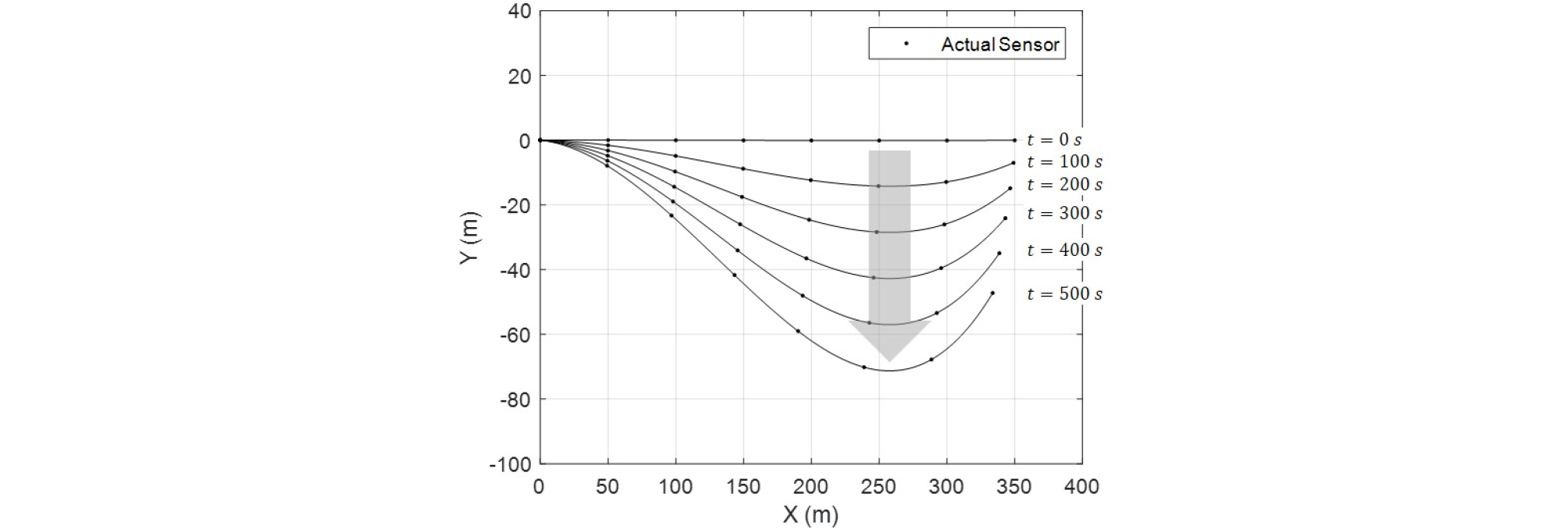
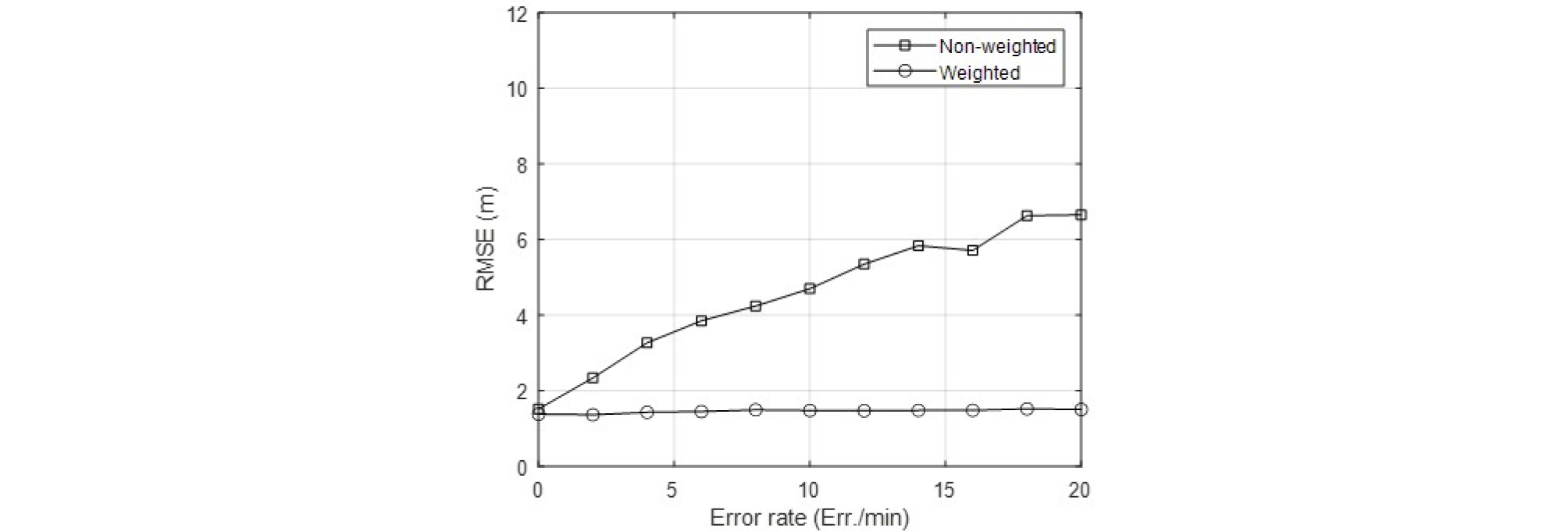
다음으로 임펄스잡음의 발생 빈도에 따른 추정 오차 분석 결과이다. 시나리오는 앞선 시험과 마찬가지로 Fig. 8과 같이 비선형성이 0 %부터 20 %로 시간에 따라 연속적으로 변하는 상황을 모사했으며, 임펄스 크기를 20° 로 고정시킨 상태에서 임펄스의 발생 빈도를 0 Err./min ~ 20 Err./min으로 2 Err./min 씩 변화시켜가며 500 s 간 배열 형상 추정을 수행하였고 RMSE로 추정성능을 비교하였다. 그 결과는 Fig. 10과 같이 기존 기법은 발생빈도가 잦아질수록 추정오차가 커지지만 제안 기법은 거의 일정한 추정성능을 유지하고 있음을 확인할 수 있었다.
V. 결 론
예인형 선배열센서의 비선형 형상을 추정하기 위해 방위센서를 이용할 경우 방위센서 신호에 유입되는 임펄스성 잡음에 의해 추정성능의 하락이 발생할 수 있다. 본 논문에서는 입력 방위센서 신호를 이전 추정치에 의해 계산된 가중치에 따라 기여도를 다르게 하는 가중 다항 근사화 기반 배열 형상 추정 기법을 제안하였다. 제안기법의 성능을 평가하기 위하여 모사된 예인형 선배열 형상에 비선형성, 잡음의 크기, 발생빈도를 변경하며 시뮬레이션을 수행하였다. 그 결과 제안기법은 임펄스잡음이 없는 경우에도 기존기법에 비해 우수한 성능을 보여주었고, 임펄스잡음이 존재할 경우 추정성능이 감소하는 기존기법과 달리 잡음의 크기와 발생빈도가 증가하는 경우에도 강인한 성능을 나타냄을 확인하였다. 향후 해상실험 등을 통해 실제 센서데이터를 획득하여 추가적인 실험을 수행할 계획이다.
